梧州定制桁架机械手,xyz桁架机器人





1/6
- ¥388000.00
- 2024-07-02 06:21:30
- 是
- 桁架机械手
- 黄小姐 18027276186
- 广州市第七轴机器人设备有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

取消
信息介绍
详细参数
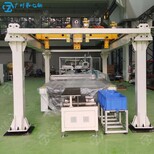
桁架机械手的结构尺寸要比其他类型的机器人的结构尺寸大得多。桁架式机器人的工作空间为一空间长方体。通过控制器对各种输入(各种传感器,按钮等)信号的分析处理,做出一定的逻辑判断后,对各个输出元件(继电器,电机驱动器,指示灯等)下达执行命令,完成X,Y,Z三轴之间的联合运动,以此实现一整套的全自动作业流程。
桁架机械手的三个运动组件为桁架机械手的核心组件,其定义规则遵循笛卡尔坐标系。各轴组件通常由结构件、导向件、传动件、传感器检测元件以及机械限位组件等五部分组成。
桁架机械手的控制部分一般包括有程序控制部分与行程检测反馈部分,是上下料机械手中的指挥系统,因为上下料机械手中的每一个程序动作都是由控制部分来指挥执行的,包括动作的执行顺序、动作的起始位置以及时间等,此外,对运行的速度和加速度也能进行控制。
- 桁架机械手
- 铸造机械设备
- 黄小姐
- 是
广州市第七轴机器人设备有限公司为你提供的“梧州定制桁架机械手,xyz桁架机器人”详细介绍


