滁州生产机器人第七轴,重载行走轨道,机器人地轨生产厂家





1/6
- 面议
- 2024-11-11 07:09:49
- 机器人第七轴,机器人地轨生产厂家
- 陕西西安
- 万经理 18011761607
- 广州第七轴智能设备有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

取消
信息介绍
详细参数
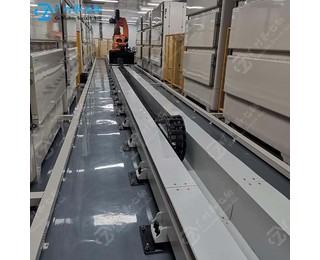
机器人第七轴的工作原理是通过其控制系统来控制机器人的移动。机器人安装在行走轴的滑座上,通过控制系统可按规定路线实行移动。机器人的移动就是第七轴上机械手移动小车的在直线方向上的移动,这是通过操作面板和显示屏进行编辑的,在有效行程范围内,基本速度在1.2m~1.8m之间,可按客户要求调试,速度都是可调的。
机器人第七轴还通过软件限位,组合行程开关限位,导轨两端的机械式停车器和导轨基础防护板来保护移动中机器人。这些保护措施可以避免机器人发生意外碰撞和机器人的正常运行。
机器人第七轴采用的控制系统和伺服系统,可以实现的定位。这使得机器人在执行任务时可以更加准确,提高了产品质量和生产效率。
- 机器人第七轴,机器人地轨生产厂家
- 铸造机械设备
- 陕西西安
- 万经理
广州第七轴智能设备有限公司为你提供的“滁州生产机器人第七轴,重载行走轨道,机器人地轨生产厂家”详细介绍



