agv无人叉车云南agv小车价格






- 面议
- 2024-12-16 16:25:02
- agv小车
- 叶佳 13316955806
- 深圳优旺特科技有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

信息介绍
详细参数
1973年,位于瑞典卡尔马市的沃尔沃装配厂着手发展异步设备装配线,来替代传统的传送带式装配线。至此,由计算机控制的装配型AGV数量达到了280辆。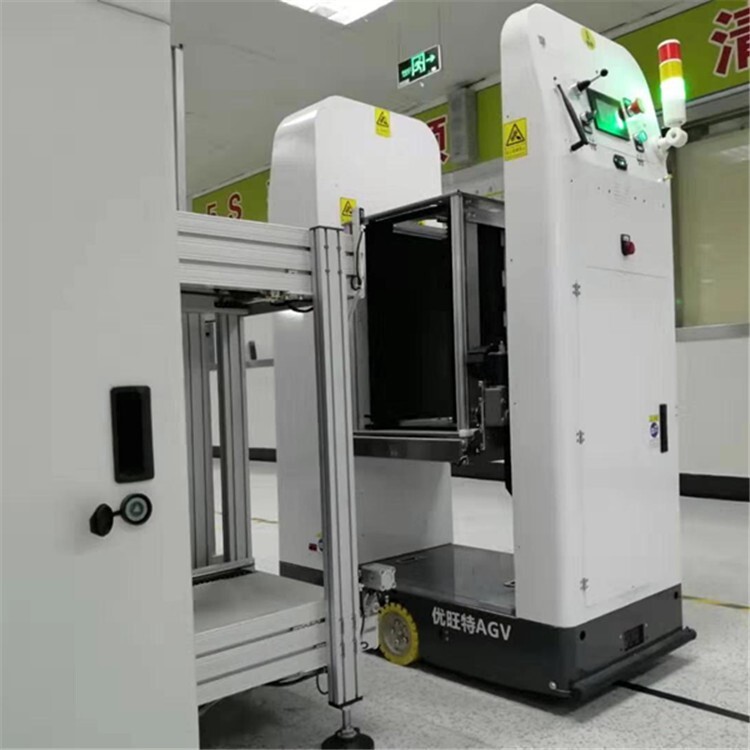
20世纪70年代中期,由于负载AGV的引入,AGV产业得到了次较大的发展。由于这些负载AGV能够为物料处理领域提供多功能的服务而被广泛接受,例如工厂里的工作站台,传送设备,以及控制系统和信息系统之间的连接等。已经有许多厂家制造的几百个负载AGV系统运转着。这些 AGV系统在仓库、工厂、作坊、医院以及其它工商业领域中得到了广泛的运用。
.智能地面和dumb小车
20世纪70年代,基本的导引技术是靠感应埋在地下的导线产生的电磁频率。通过一个叫做“地面控制器”的设备打开或关闭导线中的频率,从而指引AGV沿着预定的路径行驶。由于AGV只是沿着地面上的信号行驶,所以被称为“dumb”,而AGV行驶的路径是由智能的地面控制器决定的,因此,这一时期的系统被称为“智能地面”和“dumb小车”。
自动导向车(AGV) 是采用自动或人工方式装载货物,按设定的路线自动行驶或牵引着载货台车至地点,再用自动或人工方式装卸货物的工业车辆。按日本JISD6801的定义:AGV是以电池为动力源的一种自动操纵行驶的工业车辆。自动导向车只有按物料搬运作业自动化、柔性化和准时化的要求,与自动导向系统、自动装卸系统、通讯系统、安全系统和管理系统等构成自动导向车系统(AGVS)才能真正发挥作用。 计算机硬件技术、并行与分布式处理技术、自动控制技术、传感器技术以及软件开发环境的不断发展,为AGV的研究与应用提供了必要的技术基础。人工智能技术如理解与搜索、任务与路径规划、模糊与神经网络控制技术的发展,使AGV向着智能化和自主化方向发展。AGV的研究与开发集人工智能、信息处理、图像处理为一体,涉及计算机、自动控制、信息通讯、机械设计和电子技术等多个学科,成为物流自动化研究的热点之一。
优点
自动化程度高
由计算机,电控设备,磁气感应SENSOR,激光反射板等控制。
当车间某一环节需要辅料时,由工作人员向计算机终端输入相关信息,计算机终端再将信息发送到中央控制室,由的技术人员向计算机发出指令,在电控设备的合作下,这一指令终被AGV接受并执行——将辅料送至相应地点。
提高企业形象
AGV美观,可观赏度高,从而提高企业的形象。
方便,减少占地面积
生产车间的AGV小车可以在各个车间穿梭往复。
- agv小车
- 自动导向搬运车
- 叶佳



