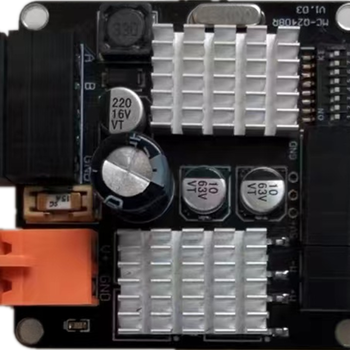
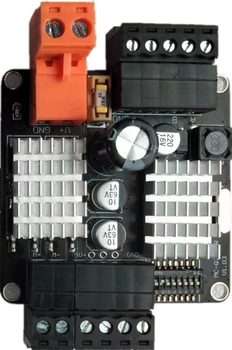
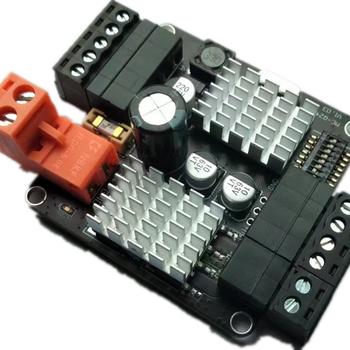
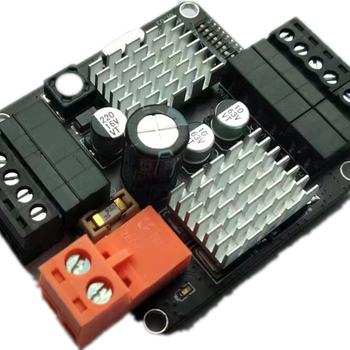

直流马达控制器36V
| 供应商 | 深圳市淼控智能科技有限公司 店铺 |
|---|---|
| 认证 | |
| 报价 | 人民币 258.00元 |
| 品牌 | 国产 |
| 型号 | MC-Q2408R |
| 产地 | 深圳 |
| 关键词 | 直流有刷电机,直流电机,直流小马达,直流马达 |
| 手机号 | 13530714675 |
| 总监 | 王伟联系时请一定说明在黄页88网看到 |
| 所在地 | 福海街道立新路2号天佑创客产业园F栋201B |
| 更新时间 | 2024-10-03 14:51:58 |
详细介绍
电流闭环PID控制器是一种用于控制电流的PID控制器,通过测量电流的实际值与设定值之间的差异,反馈给PID控制器,根据比例、积分和微分三个参数来调整输出电压或电流,使实际电流尽快趋近设定值,实现闭环控制。 在电力系统中,电流闭环PID控制器通常被用于调节电动机、变压器等设备的输出电流,以确保系统稳定性和准确性。其优点包括响应速度快、鲁棒性强、控制精度高等。
淼控智能品牌驱动器直流有刷电机小尺寸国产控制器闭环PID控制调速正反转PWM控制RS485 Modbus RTU远程控制
附录一、RS485 Modbus-RTU通讯协议
本驱动器使用MODBUS-RTU(国标GB/T19582-2008)通讯协议进行通讯,支持一主站控制多个从站,通过公共地址可发送指令配置 254 个从站地址,主站可以是单片机、PLC或PC机等。
1 、通讯参数
波特率默认为 9600bps,数据位为 8 位,无校验,停止位为 2 位;
从站地址默认为0;也可以使用公共地址0xFF;
波特率可配置为:96;
数据位可配置为:8位,9位;
停止位可配置为:1停止位,2停止位;
校验位:可配置为无校验,奇校验和偶校验;
当配置为无校验时,数据位应配置为8位,停止位配置为2位;
当选择奇校验或者偶校验时,数据位应配置为9位,停止位配置为1位;
2、 MODBUS-RTU帧格式
本驱动器支持 MODBUS 的 0x03(读保持寄存器)、0x06(写单个寄存器)和
0x10(写多个寄存器)。
2.1、 0x03 读保持寄存器
主站发送:
字节 内容
1 从站地址
2 0x03
3 起始寄存器高字节
4 起始寄存器低字节
5 寄存器数高字节
6 寄存器数低字节
7 CRC低字节
8 CRC高字节
第 1 字节: 从站地址码(=001~254)
第 2 字节 0x03: 读寄存器值功能码
第 3、4 字节: 要读的寄存器开始地址
第 5、6 字节: 要读的寄存器数量
第 7、8 字节: 从字节 1 到 6 的 CRC16 校验码
从站回送:
字节 内容
1 从站地址
2 0x03
3 字节总数
4 寄存器1的数据
5
6 寄存器2的数据
7
… … … ….
M-1 寄存器M的数据
M
M+1 CRC低字节
M+2 CRC高字节
第 2 字节 0x03: 返回读功能码
第 3 字节: 从 4 到 M(包括 4 及 M)的字节总数
第 4 到 M 字节: 寄存器数据
第 M+1、M+2 字节: 从字节 1 到 M 的 CRC16 校验码
当从站接收错误时,从站回送:
字节 内容
1 从站地址
2 0x03
3 异常码
4 CRC低字节
5 CRC高字节
第 1 字节: 从站地址码(=001~254)
第 2 字节 0x83: 读寄存器值出错
第 3 字节 异常码:见2.4
第 4、5 字节: 从字节 1 到 3 的 CRC16 校验码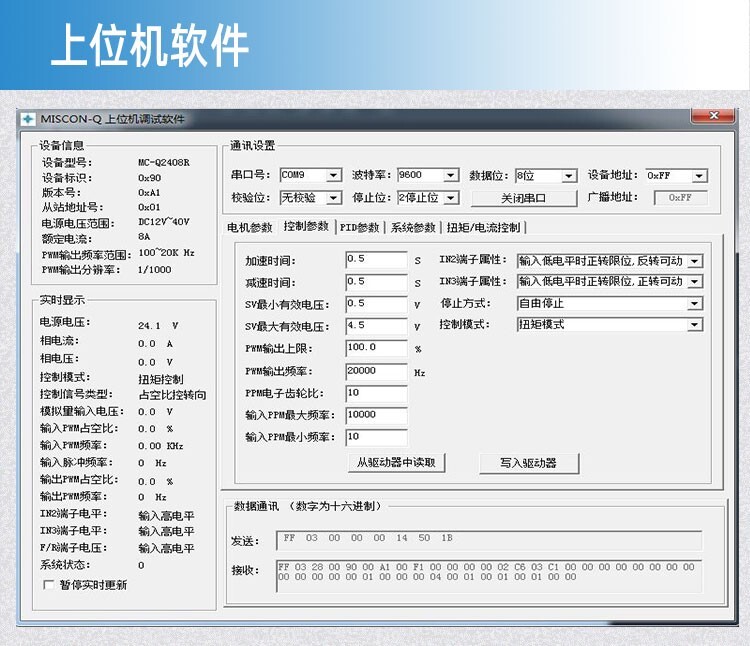
点击“从驱动器中读取”按钮,将驱动器当中的当前参数读出来,使得上位机软件与驱动器内部的参数保持一致。然后在按照实际使用情况设置好参数,正确设置。
在该页面当中:
串口波特率:是设置驱动器RS485通讯的波特率
数据位:是设置驱动器RS485通讯的数据位
停止位:是设置驱动器RS485通讯的停止位
校验位:是设置驱动器RS485通讯的校验位
串口属性设置好以后,单击“设置串口”按钮,即可完成设置;
驱动器地址:是设置驱动器的设备地址号
设置好以后,单击“设置驱动器地址”按钮,即可完成设置
可通过拨码开关选择利用模拟量控制,拨码开关设置请参考1.3。IO电平控制转向信号,悬空时为高电平信号,输入0V会改变电机转向。再次输入高电平(3.3V ~ 24V)会变回原来的转向。
利用电位器调速时,请将拨码开关设置成与模拟量控制方式一致;拨码开关的设置方法参考1.3。同时将输入大有效电压设置为5V,或者5V以下时,当电位器旋转到大可以达到全速。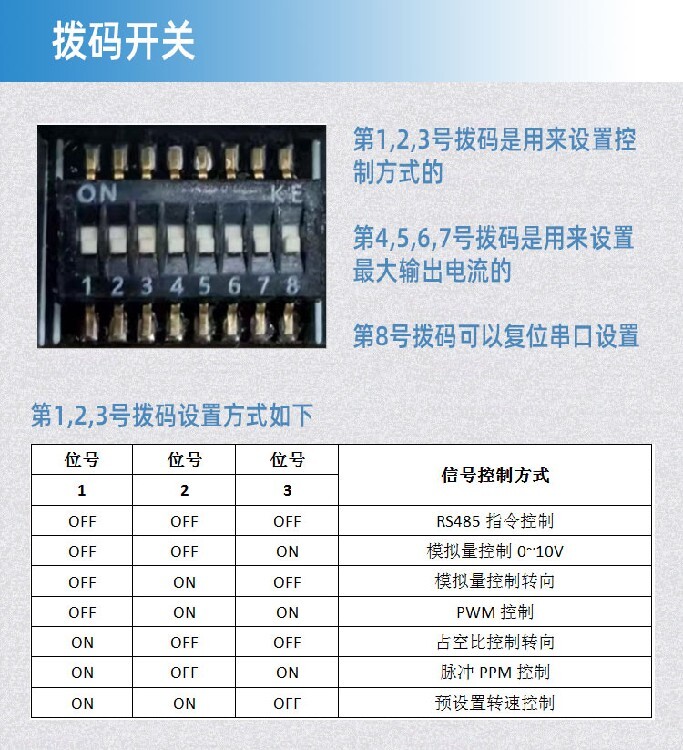
点击“从驱动器中读取”按钮,将驱动器当中的当前参数读出来,使得上位机软件与驱动器内部的参数保持一致。然后在按照实际使用情况设置好参数,正确设置,设置完成以后,点击“写入驱动器”按钮即可。
在该页面中:
加速时间:即电机从当前转速转到目标转速的缓启时间;
减速时间:即电机从当前转速降到停止的缓停时间;
SV小有效电压:即若驱动器配置模拟量控制时,则IN1端子的电压如果低于该值时,认为是零电压;
SV大有效电压:即若驱动器配置模拟量控制时,则IN1端子的电压如果该值时,认为是已达到上限电压;
PWM输出上限:即输出端输出PWM的上限,该值可以限制输出电压;
PWM输出频率:即输出端输出PWM的频率,默认为20KHz;
PPM电子齿轮比:即选择PPM控制时,用于对输入的脉冲频率进行分频;
输入PPM大频率:即当输入的脉冲频率达到该值时,输出到达大;
输入PPM小频率:即当输入的脉冲频率低于该值时,输出为零;
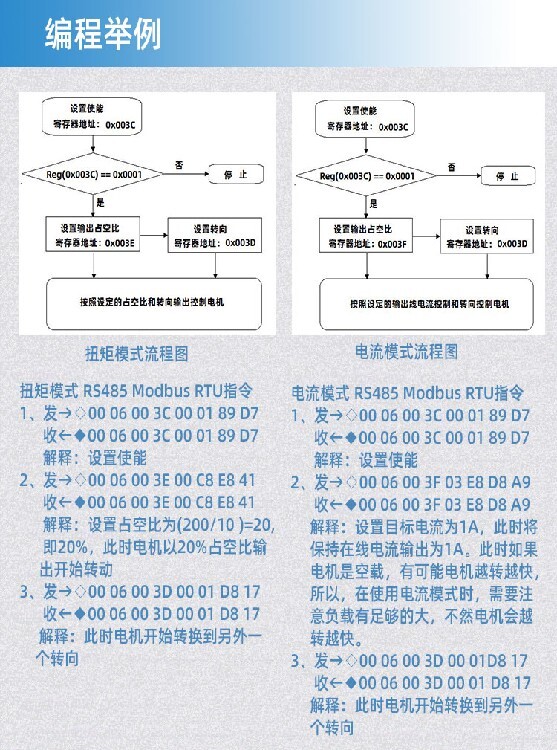
预置占空比:即当选择预置转速控制模式时,如果选择的是扭矩模式,则开机以后,按照此设置的占空比控制电机转动;
预置电流:即当选择预置转速控制模式时,如果选择的是电流模式,则开机以后,按照此设置的目标电流控制电机;
关键词:直流有刷电机,直流电机,直流小马达,直流马达