汕尾莫派克集成式吸具多少钱
影响真空吸盘选用的因素:
1、被移送物体的质量–决定吸盘的大小和数量;
2、被移送物体的形状和表面状态–选定吸盘的种类;
3、工作环境(温度)–选择吸盘的材质;
4、连接方式–吸盘、接头、缓冲连接器;
5、被移送物体的高低;
6、缓冲距离。
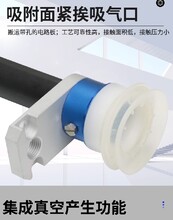
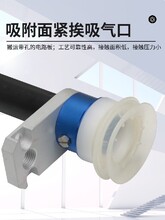
吸盘的工作原理?
吸附:吸盘与工件表面接触后,机械手通过连接的真空泵或压缩空气源在吸盘内部创建真空或气压差。这导致吸盘与工件之间的压力差,将工件牢固地吸附在吸盘上。
密封:吸盘材料通常非常柔软,能够适应工件表面的形状,并在吸附时形成密封,以确保吸盘与工件之间的真空或气压差得以维持。
释放:当需要移动或释放工件时,机械手可以切断真空或气压差,使吸盘失去吸附力,从而允许工件被轻松地移动、放置或处理。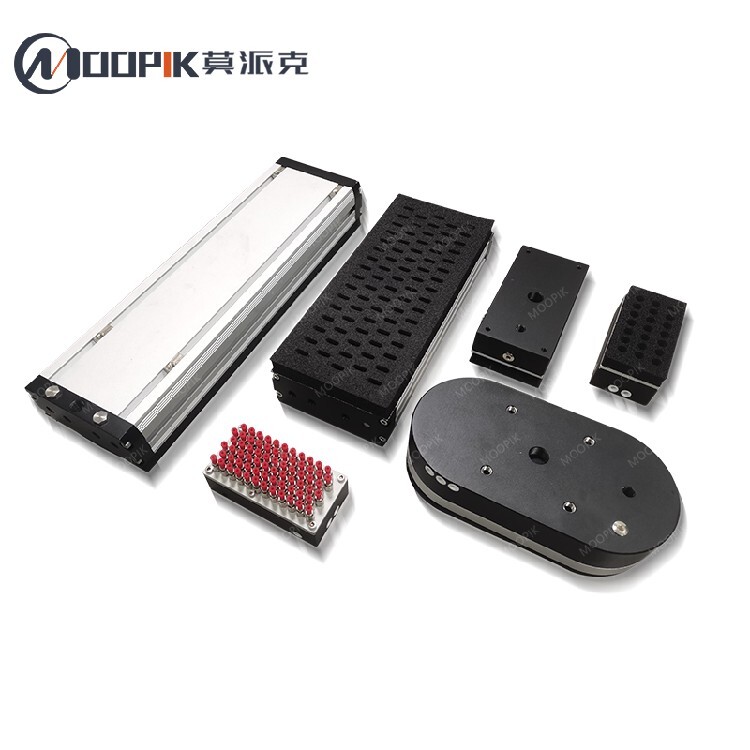
真空吸盘在真空系统中相当于是执行元件,其不仅要能应对工件的质量,也要能应对加速力。工程实际中,加速度和摩擦系数等的条件未知或无法正确把握时,可使用2.0以上的安全率。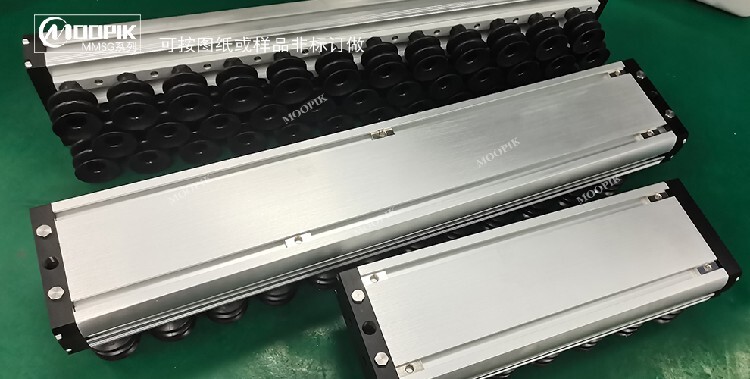
当吸盘底座上的气路被连接到真空泵时,空气就会从吸盘底部的吸孔中流入气路,并通过气管、电磁阀、气缸等元件的协调控制,完成吸和放的过程。在吸进空气后,气路会关闭,形成真空状态,使吸盘的表面和被吸物体之间的压力产生差异,从而使吸盘与被吸物体之间产生吸力。当需要放开被吸物体时,气路中的压缩空气可以通过气缸送入吸盘底座,用压缩空气打破真空吸盘与被吸物体之间的吸附力,完成放操作。
在实际生产中,如果要求吸盘具有耐油性,则可以考虑使用聚氨酯、丁腈橡胶或含乙烯基的聚合物等材料来制造吸盘。通常,为避免制品的表面被划伤,好选择由丁腈橡胶或硅橡胶制成的带有波纹管的吸盘吸盘材料采用丁腈橡胶制造,具有较大的扯断力,因而广泛应用于各种真空吸持设备上。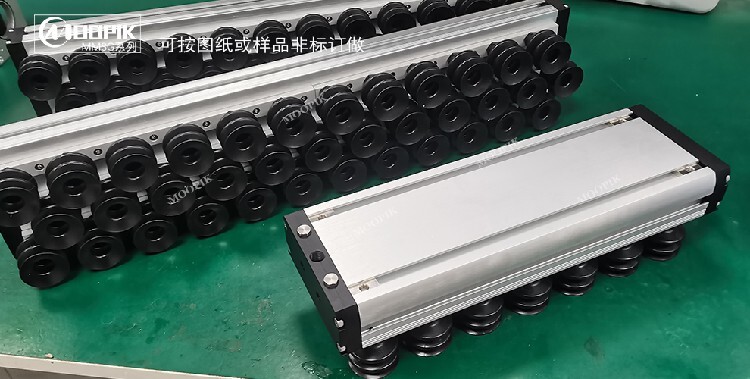
机器人电动吸盘
简介:在实际生产中,锻压机械都需要频繁搬运工件。对于多工位压力机来说,快速换模系统的送料装置上配有端拾器,也叫电动吸盘,在移动过程中,可以进行移动。
工作原理:通过吸盘吸附在工件表面、由高柔性夹具搬运工件,通过接近传感器、可编程逻辑控制器等形成了工件的自动化端拾和运送系统,了多工位压力机正常工作时的端拾和冲压速度。
优点:具备体积小、传动、高刚性、耐过载的特点,同时,由于间隙、旋转振动、惯性小,所以具有良好的加速性能,可实现平稳运转并到达较高的精度。