蓝芯科技化肥装车,山西新款智能装车系统报价
2024-03-30 00:38:32
实现作业现场系统监控,通过集中监控室,可了解所有作业现场情况,确保安全、准确作业。
人机交互有声光提示,确保析架机器人作业和托盘更换作业有序进行,不受干扰。
解决方案一:移动式
>>>带滑轨多关节机械手+传输带
作业流程:
Step1:车辆停在区域,传感器检测到位
Step2:人工启动或一卡通启动设备
Step3:3D视觉传感器识别车辆信息,规划库位
Step4:3D相机辅助机械臂抓取至传送带
Step 5:传送带运输
Step6:袋包自动抖平清灰
Step7:相机定位识别机械手夹抱物料
Step8:重复Step4~7装载码垛
Step9:满车开走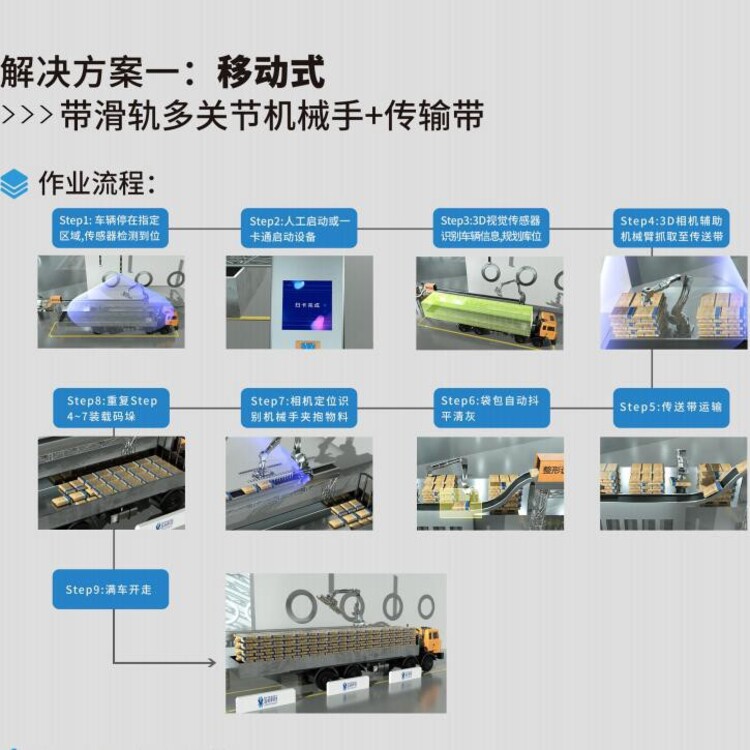
停车引导及位置偏差自适应
水平停偏
当车辆出现水平偏差,装车 机通过码垛小车行走偏移量来弥补停车位 的偏差,容许的偏移量为单边15cm。
标签:智能装车系统报价、北京智能装车系统
联系方式
杭州蓝芯科技有限公司







