广告
池州高精密永磁同步伺服主轴厂家定制

1/2
- 面议
- 2021-01-27 04:54:44
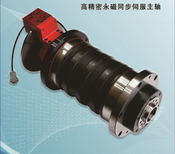
- 高精密永磁同步伺服主轴
- 江苏
- 深圳市汉锐科特精密机械有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

取消
信息介绍
详细参数
伺服控制是为满足某种目的,产生运动和对物体运动进行控制是我们人类重要的活动之一。伺服控制是对物体运动的位置、速度及加速度等变化量的有效控制。
嵌入式磁钢速率伺服电动机,它可利用凸极效应引起的交、直轴电感随位置变化的特点,构成真正意义上的无位置传感器速率伺服电动驱动系统。
转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,具体表现为例如10V对应5Nm的话,当外部模拟量设定为5V时电机轴输出为2.5Nm:如果电机轴负载低于2.5Nm时电机正转,外部负载等于2.5Nm时电机不转,大于2.5Nm时电机反转(通常在有重力负载情况下产生)。可以通过即时的改变模拟量的设定来改变设定的力矩大小,也可通过通讯方式改变对应的地址的数值来实现。
- 汉锐
- 高精密永磁同步伺服主轴
- 机床主轴
- 江苏
- 汤经理
深圳市汉锐科特精密机械有限公司为你提供的“池州高精密永磁同步伺服主轴厂家定制”详细介绍
高精密永磁同步伺服主轴信息
-
 石家庄安利产品送货电话安利实体店位置面议
石家庄安利产品送货电话安利实体店位置面议 -
 郁南安利产品送货员郁南安利专卖店地址面议
郁南安利产品送货员郁南安利专卖店地址面议 -
 南岸安利产品送货电话南岸安利实体店位置面议
南岸安利产品送货电话南岸安利实体店位置面议 -
 天津旋转制粒机厂家报价面议
天津旋转制粒机厂家报价面议 -
佛山南庄安利产品送货电话安利实体店位置面议
-
 延庆安利产品送货电话延庆安利实体店位置面议
延庆安利产品送货电话延庆安利实体店位置面议



