巴中大跨度桁架机器人设计





1/6
- 面议
- 2025-02-15 19:03:55
- 是
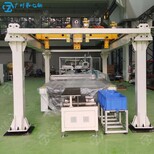
- 大跨度桁架机器人
- 黄小姐 18027276186
- 广州市第七轴机器人设备有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

取消
信息介绍
详细参数
品牌广州第七轴Z轴末端负载50-2900kg重复定位精度±0.1mm
选购大跨度桁架机器人要综合考虑自己的产品、支出预算等,大概能明白桁架机械手的价格了,想要了解更多相关信息可以联系我们。
大跨度桁架机器人各关节轴尽量相互平行;相互垂直的轴尽量相交于一点,这样可以简化机械手运动学的正向和反向计算,便于机械手的控制。

大跨度桁架机器人的臂相对于其共同的旋转轴应尽量保持重量平衡,这对减轻电机负载和提高机械手臂运动的反应速度很有好处。在设计桁架机械手的手臂时,应尽可能利用安装在机械手上的机电元器件的自重来减小机械手手臂的不平衡重量,并对剩余的不平衡重量设计平衡机构以达到平衡。平衡。必要时手臂的重量。

在大跨度桁架机器人有足够的强度和刚度的情况下,尽量在结构和材料上减轻机械手的重量。力求使用高强度轻质材料,通常采用高强度铝合金制造机械臂。从而提高了桁架机械手的运动速度和控制精度。

大跨度桁架机器人在操作过程中,用户应注意不要将手或手指伸入机械墙的缝隙中,以免挤压或夹伤甚至更严重的事故,更不能触及墙的上部。机械壁或附件顶部,在使用过程中不得摇晃机械臂以避免损坏或故障。

桁架式机器人多自由度运动,兼顾的活动范围更大,可更自由的在空间区域运行 ;有更的安装条件,可利用厂房现有牛角,可利用上层空间,不占用地面区域
- 大跨度桁架机器人
- 铸造设备
- 黄小姐
- 是
广州市第七轴机器人设备有限公司为你提供的“巴中大跨度桁架机器人设计”详细介绍
推荐信息
-
 惠州智能智能自学习喷涂机器人,定制智能自学习喷涂机器人厂家
惠州智能智能自学习喷涂机器人,定制智能自学习喷涂机器人厂家 -
 上海自动智能喷漆机器人生产线方案,免编程智能喷涂机器人
上海自动智能喷漆机器人生产线方案,免编程智能喷涂机器人 -
 佛山实惠智能喷漆机器人生产线方案,免编程智能喷涂机器人
佛山实惠智能喷漆机器人生产线方案,免编程智能喷涂机器人 -
 江苏工业智能喷漆机器人生产线方案,免编程智能喷涂机器人
江苏工业智能喷漆机器人生产线方案,免编程智能喷涂机器人



