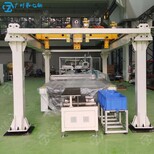
宁德大跨度桁架机器人生产线,大型桁架机械手





1/6
- 面议
- 2025-01-26 19:45:49
- 是
- 大跨度桁架机器人
- 黄小姐 18027276186
- 广州市第七轴机器人设备有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

取消
信息介绍
详细参数
品牌广州第七轴Z轴末端负载50-2900kg重复定位精度±0.1mm
大跨度桁架机器人各关节轴尽量相互平行;相互垂直的轴尽量相交于一点,这样可以简化机械手运动学的正向和反向计算,便于机械手的控制。
减少摩擦作为大跨度桁架机器人的工作条件之一,大跨度桁架机器人也应尽可能减少机械间隙带来的运动误差。因此,在设计桁架机械手时,机械手各关节的承载距离应尽可能远。它可以很小,每个关节都应该有一个可靠且易于调整的轴承间隙调节机构。

大跨度桁架机器人的主要功能就是实现工件的轨迹运动,因此工件的重量参数即为重要,轻者不能满足运动需求,重者还会引发安全事故,且机械手的负载能力远超过工件的重量,具体负载能力还需要根据运行速度和工件的重要来确定。
- 大跨度桁架机器人
- 铸造设备
- 黄小姐
- 是
广州市第七轴机器人设备有限公司为你提供的“宁德大跨度桁架机器人生产线,大型桁架机械手”详细介绍



