无锡莫派克集成式吸具现货直发,机器人吸盘





- 面议
- 2024-11-09 16:25:23
- 集成式吸具,机器人吸盘,自动化吸盘,工业..
- 刘晓 13423309630
- 东莞市莫派克气动元件有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

信息介绍
详细参数
真空吸盘通过其自身的接管与真空设备相连接,然后与被吸物品接触,开启真空设备抽吸空气,是吸盘内的空气被吸出,产生负气压,这样就可以把物品吸牢固,进而来搬运物品。当物品到达你所想它到达的地方的时候就可以再次打开真空设备,进行真空吸盘内的充气,这样,真空吸盘内的气压就会升高,物品就可以脱离真空吸盘的吸附了。
真空吸盘在真空系统中相当于是执行元件,其不仅要能应对工件的质量,也要能应对加速力。工程实际中,加速度和摩擦系数等的条件未知或无法正确把握时,可使用2.0以上的安全率。
根据吸附物的形状,材质选择吸盘形状。 平形吸盘,适用一般吸附物(吸附物表面平整,变形小的物体)。 深形吸盘,用于球形吸附物。 皱褶形或叫风琴形吸盘,适合需缓冲功能但安装尺寸不适合其他缓冲机构的场合,还有是吸附物表面为斜面时。 椭圆形吸盘,应用于长方形的吸附物。 海绵型吸盘,应用于表面凹凸不平的吸附物。
当吸盘底座上的气路被连接到真空泵时,空气就会从吸盘底部的吸孔中流入气路,并通过气管、电磁阀、气缸等元件的协调控制,完成吸和放的过程。在吸进空气后,气路会关闭,形成真空状态,使吸盘的表面和被吸物体之间的压力产生差异,从而使吸盘与被吸物体之间产生吸力。当需要放开被吸物体时,气路中的压缩空气可以通过气缸送入吸盘底座,用压缩空气打破真空吸盘与被吸物体之间的吸附力,完成放操作。
真空吸盘吸取技术已越来越广泛地应用于工业自动化各个领域,主要用于吸取易碎、难以挟持的工件,以完成搬运、夹紧或包装等作业。现阶段,普遍使用的气动真空元件为真空吸盘。在真空吸取过程中,系统响应过程可分为真空产生阶段和真空维持阶段,通常真空维持阶段的工作时间相对较长。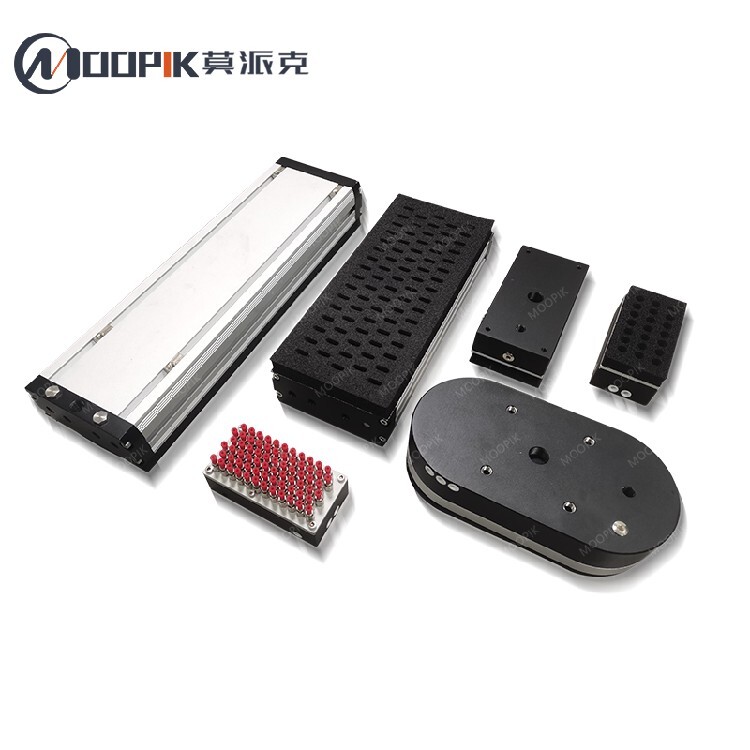
机器人电动吸盘
简介:在实际生产中,锻压机械都需要频繁搬运工件。对于多工位压力机来说,快速换模系统的送料装置上配有端拾器,也叫电动吸盘,在移动过程中,可以进行移动。 工作原理:通过吸盘吸附在工件表面、由高柔性夹具搬运工件,通过接近传感器、可编程逻辑控制器等形成了工件的自动化端拾和运送系统,了多工位压力机正常工作时的端拾和冲压速度。 优点:具备体积小、传动、高刚性、耐过载的特点,同时,由于间隙、旋转振动、惯性小,所以具有良好的加速性能,可实现平稳运转并到达较高的精度。
- 集成式吸具,机器人吸盘,自动化吸盘,工业..
- 吸盘
- 刘晓


