多功能机器人地轨报价及图片山东济宁,机器人第七轴,生产厂家






- 面议
- 2024-11-05 03:28:32
- 机器人地轨,机器人行走轨道,机器人行走轴..
- 万经理 18011761607
- 广州第七轴智能设备有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

信息介绍
详细参数
机器人地轨主要是带动工业机器人按路线进行移动,扩大机器人作业半径,扩展机器人使用范围功能,进一步提高机器人使用效率,降低机器人使用成本,实现全面自动化生产。
地轨作为执行机构,具有控制方便、执行动作灵活、可实现复杂的空间轨迹控制的特点。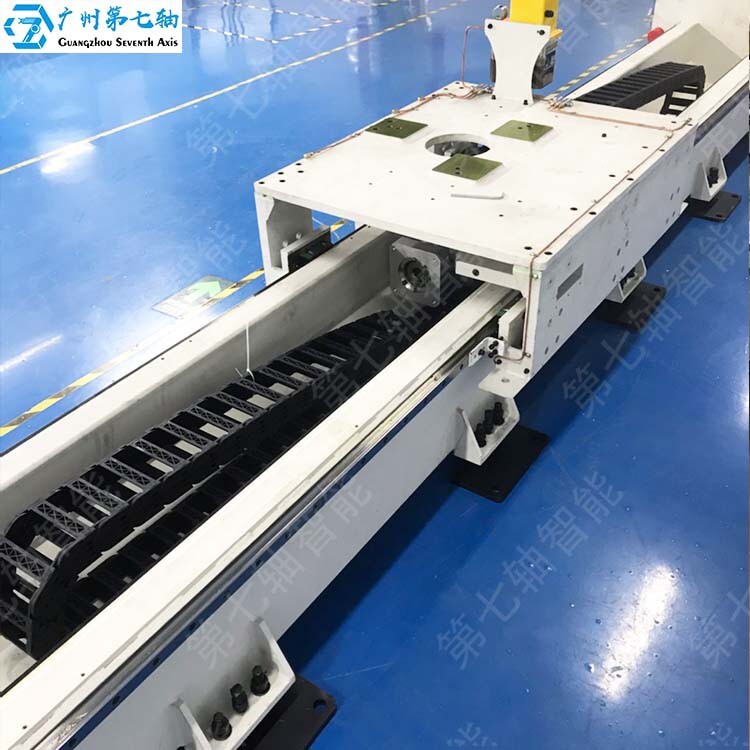
机器人地轨的系统功能都有哪些?
系统程序控制:地轨系统与“模架”的信号接口及系统接口全部都是采用数字信号传输,从而互相之间的稳定性及牢靠性。具备手动和自动两种运转控制方式, 手动方式下可单操作某一个工位,自动方式下按设定的运转程序自动运转。
软件功能作用:完成工位无序工作,即:随机发起工作信号,七轴可以依据发起的先后顺序依次完成工作;并且在信号复位后可以肃清掉一切未执行的信号。
急停连锁功用:随意激起任何一个急停按钮(及七轴、机器人),七轴可以立刻中止正在完成的动作,只要在该急停重新复位后设备才恢复正常运转。
信号安全性:在较短的时间内连续给出两次信号,机器人地轨只执行一次信号而不会连续工作两次;在程序晋级后,有完好的系统备份。
移动与定位:可经过操作面板及显现屏直接编辑,理论上在直线轴有效行程范围内,能够设置无数个定位点。位置精度由编码器准确检测,经过伺服系统控制电机,精度在±0.5mm范围之内。
安全保养及维护:外用钥匙维护开关,当某个模架不用时(如:某个模架呈现毛病需维修),采用外用钥匙维护开关跳过此模架,这样不会由于人为的误操作或其他的不测而造成产品的报废。
急停按钮:每台模架具备在紧急状况时中止整个系统的急停按钮。
系统接口:一切硬件接口和软件功用由提供方对接,所有客户的需求。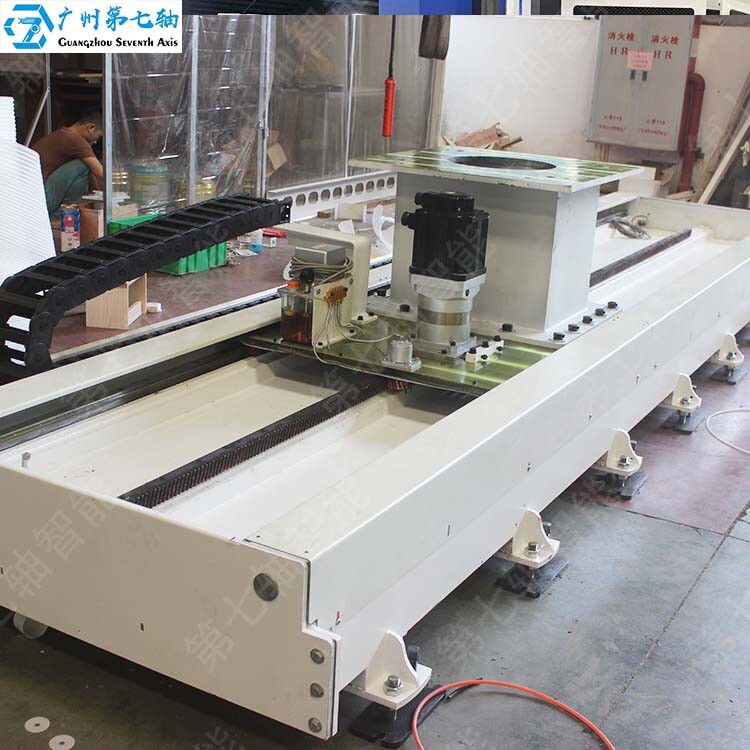
机器人地轨的特点
经济实惠:,安装简易快速,维护方便;
优化设计:模块化设计,长度在整数范围内可以任意调整;
自动化程度:自动化程度比较高、可同料台、多台不同类型机床、缓存及抽检设备等组成不同形式的生产线;
精度高:机器人地轨经过初次定位和重复定位可实现±0.05的;
速度快:大运行速度可达1.5-1.8m/s(不同负载对应的运行速度不一样);
作业范围:搬运、包装、机床上下料、码垛、机械加工等。
- 机器人地轨,机器人行走轨道,机器人行走轴..
- 铸造机械设备
- 万经理
推荐信息
-
 芜湖机器人行走轴材质,搬运焊接喷涂打磨直线行走轨道
芜湖机器人行走轴材质,搬运焊接喷涂打磨直线行走轨道 -
 松江生产桁架机器人,自动上下料桁架机械手,非标定制厂家
松江生产桁架机器人,自动上下料桁架机械手,非标定制厂家 -
 淮南变位机规格,重载变位机,定制加工厂家
淮南变位机规格,重载变位机,定制加工厂家 -
 贵港焊接变位机价格,机器人协同焊接工作台,定制加工
贵港焊接变位机价格,机器人协同焊接工作台,定制加工