宁河自动化生产桁架机械手生产厂家,机床自动桁架机器人





1/6
- ¥388000.00
- 2024-06-27 04:45:55
- 是
- 桁架机械手
- 黄小姐 18027276186
- 广州市第七轴机器人设备有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

取消
信息介绍
详细参数
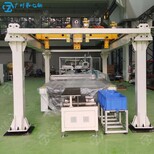
桁架机械手的空间运动是用三个相互垂直的直线运动来实现的。桁架式机械手通过工业控制器(如:PLC,运动控制,单片机等)实现。由于直线运动易于实现全闭环的位置控制,所以,桁架式机器人有可能达到的位置精度(μm级)。
桁架机械手广泛应用于数控车床、加工、磨床、插齿机、清洁机等设备进行加工自动化上下料。由多维直线导轨搭建而成.直线导轨由精制铝型材、齿型带、直线滑动导轨或齿轮齿条等组成。
上下料桁架机械手通过驱动部分来产生动力,因此驱动部分也是它的动力源,通常有液压、气压、电力以及机械式驱动四种不同的驱动形式。其中,液压驱动系统是由油缸、阀、油阀和油箱等组成;气压驱动系统是由气缸、气阀、空压机(或由空气压缩机站直接提供)和储气罐等组成;电机驱动系统是由一些电动机组成。
- 桁架机械手
- 铸造机械设备
- 黄小姐
- 是
广州市第七轴机器人设备有限公司为你提供的“宁河自动化生产桁架机械手生产厂家,机床自动桁架机器人”详细介绍



