永和县机器人变位机生产线方案





1/6
- 面议
- 2025-02-22 07:15:18
- 是
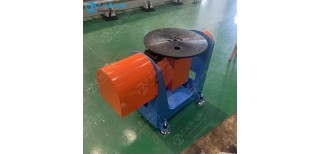
- 机器人变位机
- 黄小姐 18027276186
- 广州市第七轴机器人设备有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

取消
信息介绍
详细参数
常用的人工焊接机器人变位机基本形式有伸臂式、倾翻回转式和双立柱单回转式等。由于受到回转自由度的限制,这几种变位机均不能实现被焊工件在空间内的任意旋转,所以不能使各类焊缝转动到所需要的合适位置。
根据焊接结构件的特点选择合适的焊接机器人变位机 如推土机后桥箱、挖掘机X架可用L型双回转式焊接变位机,推土机台车架可用滚轮架式焊接变位机,挖掘机铲斗焊接变位机可设计成C型双回转式,挖掘机动臂可用双立柱单回转式变位机。
随着焊接技术和自动化技术的不断进步,焊接机器人变位机将进一步发展。未来的焊接变位机将更加智能化、灵活化和可靠化,能够适应更复杂的焊接任务,并与其他智能装备实现更高程度的集成
- 机器人变位机
- 铸造机械设备
- 黄小姐
- 是
广州市第七轴机器人设备有限公司为你提供的“永和县机器人变位机生产线方案”详细介绍



