沧州国产桁架机械手生产线方案,xyz桁架机器人





1/6
- ¥388000.00
- 2024-11-13 04:13:54
- 是
- 桁架机械手
- 黄小姐 18027276186
- 广州市第七轴机器人设备有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

取消
信息介绍
详细参数
第七轴机器人可为客户提高设计及生产定制化服务,20多年数控技术,设计,提升扩大机器人的工作半径范围,帮助用户提高生产效率,直接降低生产成本。
桁架机械手的空间运动是用三个相互垂直的直线运动来实现的。桁架式机械手通过工业控制器(如:PLC,运动控制,单片机等)实现。由于直线运动易于实现全闭环的位置控制,所以,桁架式机器人有可能达到的位置精度(μm级)。
桁架机械手主要由多种机器人行走轴搭建而成,各机器人行走轴由重载铝型材、滚轮直线导轨和伺服电机等组成。作为运动框架和载体的重载铝型材其截面形状通过有限元分析法来优化,生产中的尽心竭力,提高其强度和直线度。采用滚轮V型导轨作为运动导轨。
桁架机械手采用型材或方钢做为主框架,镶嵌直线滑动导轨和齿轮齿条等组成,作为运动框架和载体的精制型材其截面形状通过有限元分析法来优化,生产中的尽心竭力,提高其强度和直线度。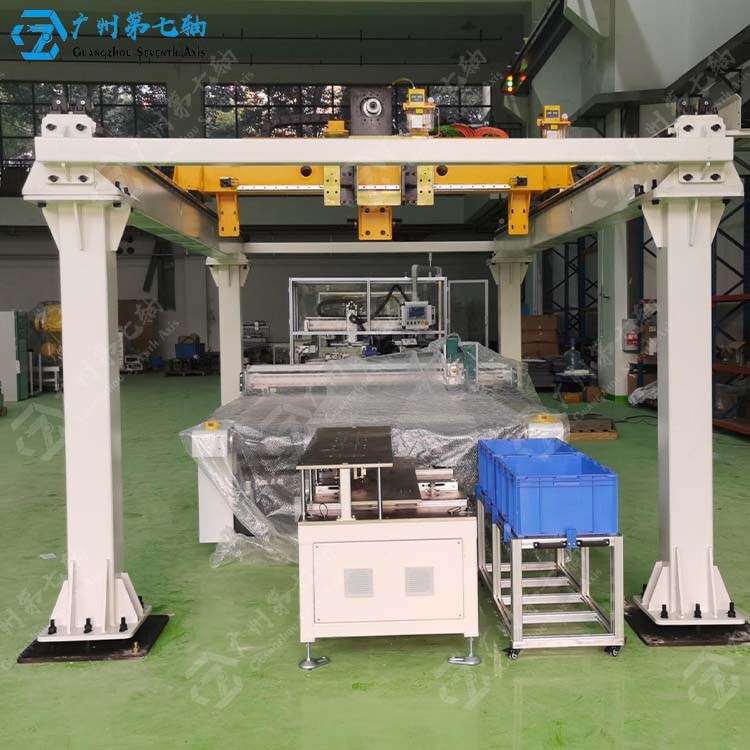
桁架机械手是工业应用中,能够实现自动控制的、可重复编程、多功能、多自由度、运动自由度间成空间直角关系、多用途的操作机。他能够搬运物体、操作工具,以完成各种作业。
桁架机械手主要由立柱等结构件组成,其作用是将各轴架空至一定高度,多由铝型材或方管、矩形管、圆管等焊接件构成;主要构成有X轴组件、Y轴组件、Z轴组件。
- 桁架机械手
- 铸造机械设备
- 黄小姐
- 是
广州市第七轴机器人设备有限公司为你提供的“沧州国产桁架机械手生产线方案,xyz桁架机器人”详细介绍



