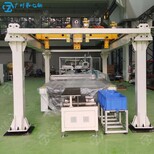
滨海新区智能桁架机械手生产线,厂家定制XYZ桁架机械手





1/6
- ¥388000.00
- 2025-02-04 04:39:37
- 是
- 桁架机械手
- 黄小姐 18027276186
- 广州市第七轴机器人设备有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

取消
信息介绍
详细参数
桁架机械手的结构尺寸要比其他类型的机器人的结构尺寸大得多。桁架式机器人的工作空间为一空间长方体。通过控制器对各种输入(各种传感器,按钮等)信号的分析处理,做出一定的逻辑判断后,对各个输出元件(继电器,电机驱动器,指示灯等)下达执行命令,完成X,Y,Z三轴之间的联合运动,以此实现一整套的全自动作业流程。
桁架机械手是工业应用中,能够实现自动控制的、可重复编程、多功能、多自由度、运动自由度间成空间直角关系、多用途的操作机。他能够搬运物体、操作工具,以完成各种作业。
桁架机械手由结构框架、X轴组件、Y轴组件、Z轴组件、工装夹具以及控制柜,六部分组成。抓取和传送机构抓取和传送机构又被形象的称之为手部和臂部,其中,抓取机构包括有手指和传力机构,在工作中起到对物件进行抓取和放置的作用。上下料机械手的传送机构则包含了手腕和手臂等结构,在实践当中可以用来改变物件的方位以及位置。
桁架机械手主要由立柱等结构件组成,其作用是将各轴架空至一定高度,多由铝型材或方管、矩形管、圆管等焊接件构成;主要构成有X轴组件、Y轴组件、Z轴组件。
桁架机器人结构件由铝型材或方管,矩形管,槽钢,工字钢等结构组成,其作用是作为导向件、传动件等组件的安装底座,同时也是桁架式机械手负载的主要承担者。
上下料桁架机械手通过驱动部分来产生动力,因此驱动部分也是它的动力源,通常有液压、气压、电力以及机械式驱动四种不同的驱动形式。其中,液压驱动系统是由油缸、阀、油阀和油箱等组成;气压驱动系统是由气缸、气阀、空压机(或由空气压缩机站直接提供)和储气罐等组成;电机驱动系统是由一些电动机组成。
- 桁架机械手
- 铸造机械设备
- 黄小姐
- 是
广州市第七轴机器人设备有限公司为你提供的“滨海新区智能桁架机械手生产线,厂家定制XYZ桁架机械手”详细介绍



