邢台桁架机械手价格,上下料天轨桁架机器人






1/6
- ¥388000.00
- 2025-01-22 04:28:54
- 是
- 桁架机械手
- 黄小姐 18027276186
- 广州市第七轴机器人设备有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

取消
信息介绍
详细参数
桁架机械手由结构框架、X轴组件、Y轴组件、Z轴组件、工装夹具以及控制柜,六部分组成。抓取和传送机构抓取和传送机构又被形象的称之为手部和臂部,其中,抓取机构包括有手指和传力机构,在工作中起到对物件进行抓取和放置的作用。上下料机械手的传送机构则包含了手腕和手臂等结构,在实践当中可以用来改变物件的方位以及位置。
桁架机器人结构件由铝型材或方管,矩形管,槽钢,工字钢等结构组成,其作用是作为导向件、传动件等组件的安装底座,同时也是桁架式机械手负载的主要承担者。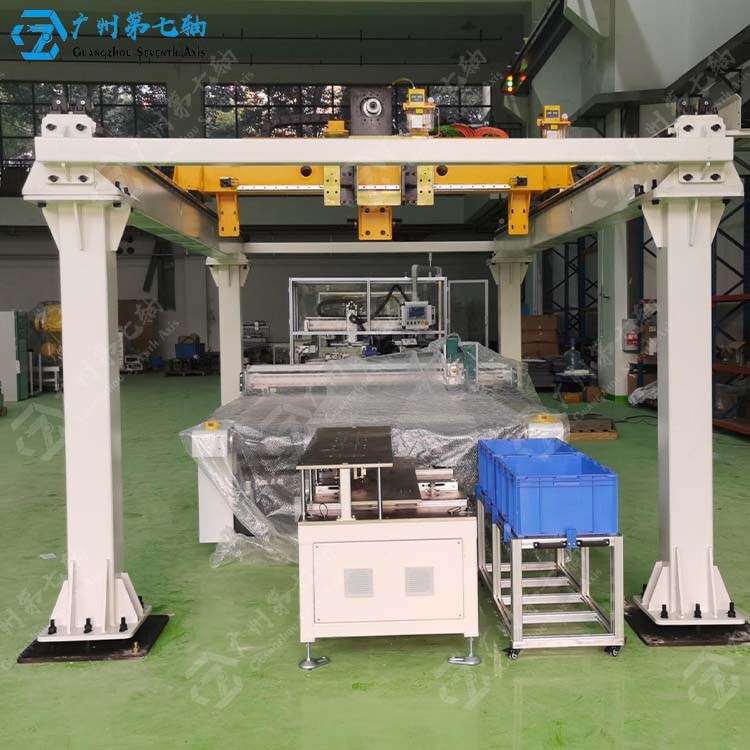
桁架机械手的控制部分一般包括有程序控制部分与行程检测反馈部分,是上下料机械手中的指挥系统,因为上下料机械手中的每一个程序动作都是由控制部分来指挥执行的,包括动作的执行顺序、动作的起始位置以及时间等,此外,对运行的速度和加速度也能进行控制。
- 桁架机械手
- 铸造机械设备
- 黄小姐
- 是
广州市第七轴机器人设备有限公司为你提供的“邢台桁架机械手价格,上下料天轨桁架机器人”详细介绍
推荐信息
-
 西青定制方案桁架机械手厂家,厂家定制XYZ桁架机械手
西青定制方案桁架机械手厂家,厂家定制XYZ桁架机械手 -
 保定国产桁架机械手生产线,桁架机器人厂家
保定国产桁架机械手生产线,桁架机器人厂家 -
 宁河自动化生产桁架机械手生产厂家,上下料天轨桁架机器人
宁河自动化生产桁架机械手生产厂家,上下料天轨桁架机器人 -
 红桥性能稳定桁架机械手生产线方案,厂家定制XYZ桁架机械手
红桥性能稳定桁架机械手生产线方案,厂家定制XYZ桁架机械手



