工业机器人变位机生产厂家





1/6
- 面议
- 2025-01-15 07:34:44
- 是
- 机器人变位机
- 黄小姐 18027276186
- 广州市第七轴机器人设备有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

取消
信息介绍
详细参数
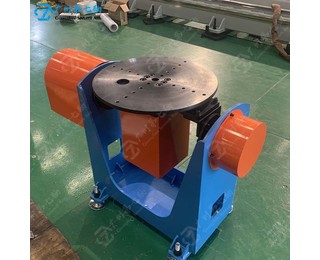
常用的人工焊接机器人变位机基本形式有伸臂式、倾翻回转式和双立柱单回转式等。由于受到回转自由度的限制,这几种变位机均不能实现被焊工件在空间内的任意旋转,所以不能使各类焊缝转动到所需要的合适位置。
机器人变位机是焊接辅助设备,适用于回转工作的焊接变位,以得到理想的加工位置和焊接速度。可与操作机、焊机配套使用,组成自动焊接中心,也可用于手工作业时的工件变位。工作台回转采用变频器无级调速,调速精度高。遥控盒可实现对工作台的远程操作,也可与操作机、焊接机控制系统相连,实现联动操作。
焊接作为制造业中重要的连接工艺,传统的人工焊接存在效率低下、质量不稳定和劳动强度大的问题。机器人变位机作为焊接自动化装备的重要组成部分,为焊接行业带来了革命性的变革。
在多工位焊接过程中,焊接机器人变位机用于实现工件在不同工作站点之间的快速转移。变位机的高速度和,确保了工件的准确定位和稳定传递,提高了多工位焊接的效率和一致性。
焊接机器人变位机作为焊接自动化的关键装备,在焊接行业发挥着重要作用。其多样化的应用领域和特的优势,推动了焊接质量的提升、生产效率的提高和工人安全的保障。随着技术的不断进步,焊接变位机将继续演进,为焊接行业带来更多创新和进步。
焊接机器人变位机也正朝着智能化、多功能化、大型化、集成化、、高可靠性的方向发展。对于大型工件的安装和焊接,要清楚说明升降式焊接变位机的组成和结构。同时,旋转组织和倾斜组织是该计划的核心部分,主要涉及齿轮传动计划和轴计划和检查。
- 机器人变位机
- 铸造机械设备
- 黄小姐
- 是
广州市第七轴机器人设备有限公司为你提供的“工业机器人变位机生产厂家”详细介绍



