甘肃工业机器人行走轨道





- 面议
- 2025-03-28 01:57:45
- 机器人行走轨道,机器人行走轴,机器人第七..
- 万经理 18011761607
- 广州第七轴智能设备有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

信息介绍
详细参数
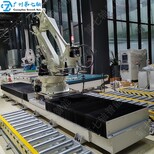
机器人行走轨道目的是为了带动工业机器人按的路线进行运动,扩大机器人工作半径,扩大机器人应用范围功能,进一步提升机器人使用效率,减少机器人使用成本,实现多方位自动化生产。
机器人行走轨道的特点:
经济实用:高性价比,安装简单迅速,维护保养便捷;
优化设计:模块化设计,长度在整数范围之内可以随意调整;
自动化程度:自动化程度比较高、能同料台、多台不同类型数控车床、缓存及抽检设备等构成不同形式的生产线;
精度高:经过初次定位和重复定位可实现±0.05的;
速度快:大运行速度可以达到1.5-1.8m/s(不同负载对应的运行速度不一样);
作业范围:搬运、包装、机床上下料、码垛、机械加工等。
科技的迅猛发展,机器人技术不断地提升,机器人的轴数愈来愈多,性能愈来愈好。在有些空间比较复杂、工件很大场合采用多台机器人生产成本会比较高,这时机器人行走轨道的运用克服了这一难题。
机器人行走轴,又叫机器人地轨,机器人第七轴,工业机器人导轨,机器人滑轨,是是六轴机器人的辅助机构,带动机器人到不同工位进行管理的行走系统。在实际生产制造运用中,可以根据运用场合的不同分为很多种形式,例如地面行走轴、侧挂行走轴、底挂行走轴等。
1、地面行走轴:是比较常见的一种安装形式,在打磨、上下料、搬运等工序运用很广
2、侧挂行走轴:一般采用较轻的材质,在喷涂、焊接工序运用较多。
3、吊挂行走轴:在机床上下料、喷涂、焊接等工位运用较多。不同的样式应用于不同类型的工业制造场合。
从负载上来说,不同类型的的样式承受能力不一样,地轨式第七轴能够承受辅助重型机器人行走作业,前两种却承受不住;此外其成材、技术要求、价格也有所不同,同等负载吊挂式比地轨式成本造价要高。
技术安装方面,吊挂式的行走轴安装比地轨式行走轴要比较复杂、难度高。所以说用户在选型时要与技术人员沟通交流清楚,选择适合自己的一款机器人行走方案,防止不必要资源浪费。
- 机器人行走轨道,机器人行走轴,机器人第七..
- 铸造机械设备
- 万经理
推荐信息
-
 浦东桁架机械手尺寸,桁架式工业机械手,非标定制厂家
浦东桁架机械手尺寸,桁架式工业机械手,非标定制厂家 -
 巫山机器人第七轴功能机器人地轨机器人地面行走轴
巫山机器人第七轴功能机器人地轨机器人地面行走轴 -
 阜阳桁架机械手作用,龙门式上下料机械臂,非标定制厂家
阜阳桁架机械手作用,龙门式上下料机械臂,非标定制厂家 -
 渝中桁架机械手出售,自动上下料机器人,非标定制厂家
渝中桁架机械手出售,自动上下料机器人,非标定制厂家



