艾豆智能扫地机器人陀螺仪模块方案设计




- 面议
- 2019-04-25 09:21:06
- 项目的可行性研究
- 咨询和信息咨询
- 智能扫地机配件,陀螺仪模块,陀螺仪软件,..
- 韦先生 13777490259
- 杭州艾豆智能科技有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

信息介绍
详细参数
陀螺仪导航智能扫地机器人有以下优势:
1)路径规划
2)弓字清扫
3)记忆路线
4)控制行速
5)智能补漏
6)室内定位导航
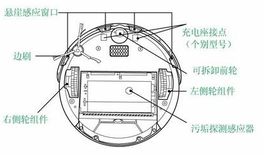
1、移动系统
移动系统,是智能扫地机器人的主体,它控制这机器人的前进,后退,旋转等功能,是机器人的“大腿”。家用扫地机器人采用轮式结构,由两个后轮控制机器人的运动。后轮附有减震机构,能让机器人在复杂的家庭环境下如履平地,有助于扫地机器人爬坡,越障等。
2、感知系统
感知系统包括红外测距模块、超声波测距模块、避障模块、悬崖传感器、抱起传感器、加速度计、陀螺仪等,感知模块能感受周围环境的变换,分析出障碍物的位置、方向等信息,超声波测距的原理是,通过想前进方向发射超声波脉冲、并接受相应的返回声波脉冲,通过声波的传播速度,计算出障碍物的距离,通过MCU,或DSP为核心的控制器,实现对超声波的发送和接受控制,并在处理返回脉冲信号的基础上加以判断计算出障碍物的距离和位置。
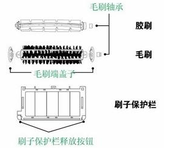
3、清扫系统,
清扫系统包括边刷、中扫,吸尘系统,装置垃圾的尘合等组成,边刷,滚刷分别有电机控制,称之为边刷电机,中扫电机,吸尘系统无刷电机组成,无刷电机转速能达到一万转的转速,通过高速的转动,带动风叶,形成腔内真空效应,达到吸取垃圾的作用,吸取的垃圾放置在垃圾盒中。
4、控制系统
控制系统通过控制感知系统,通过红外或超声波计算出障碍物的位置,计算出优化路径,驱动后轮电机,控制机器运动,同时控制器自身的清扫器件对地面进行清扫。并在低电压的时候控制扫地机器人自动对接回充。
5、电源系统
电源系统包括电池供电、充电系统。扫地机器人采用动力电池供电,需要有的电池充电算法,保护电池,避免充电过热产生危及人身安全的事情。
6、导航系统
SLAM :Simultaneous Localization and Mapping:
即时定位与地图构建,指机器人在自身位置不确定的条件下,在完全未知环境中创建地图,同时利用地图进行自主定位和导航位.
SLAM问题可以描述为: 机器人在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计,利用自身携带的传感器识别未知特征路标,递增建立环境导航地图,利用已建立的地图来同步刷新自身位置。
- 智能扫地机配件,陀螺仪模块,陀螺仪软件,..
- 技术咨询
- 韦先生
- 项目的可行性研究
- 咨询和信息咨询
智能扫地机信息
-
 阜宁到镇雄的客车欢迎致电¥ 18
阜宁到镇雄的客车欢迎致电¥ 18 -
 上海瞳睬全国招商电话代理费用面议
上海瞳睬全国招商电话代理费用面议 -
 威海专业服装摄影、3D立体服装拍摄、服装模特外景拍面议
威海专业服装摄影、3D立体服装拍摄、服装模特外景拍面议 -
 陶瓷马赛克厂家泳池马赛克拼图厂家直销面议
陶瓷马赛克厂家泳池马赛克拼图厂家直销面议 -
 广州潮牌童装批发市场小清新名媛气质淑女露肩雪纺上衣碎花阔腿裤两件套批发¥ 5.5
广州潮牌童装批发市场小清新名媛气质淑女露肩雪纺上衣碎花阔腿裤两件套批发¥ 5.5 -
 江苏常熟矿山不能装药怎么大规模开采石头点击观看¥ 7580
江苏常熟矿山不能装药怎么大规模开采石头点击观看¥ 7580