佛山定制晶圆扶梯晶圆查看器




1/6
- 面议
- 2025-03-01 00:37:54
- 晶圆扶梯,晶圆读号器,晶圆查看器,晶圆扶梯
- 张先生 15962404138
- 苏州硕世微电子有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

取消
信息介绍
详细参数
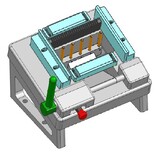
电机驱动滑块沿导轨导向运动,检测单元反馈位置信号控制机构运动,真空吸附单元与导轨滑块用连接块连接,跟随滑块运动运载晶圆,其上加装缓冲装置单元,使吸管与晶圆、晶圆与上下臂和吸盘接触过程中防止吸附的晶圆产生变形甚至破损,以及减小对电机的冲击。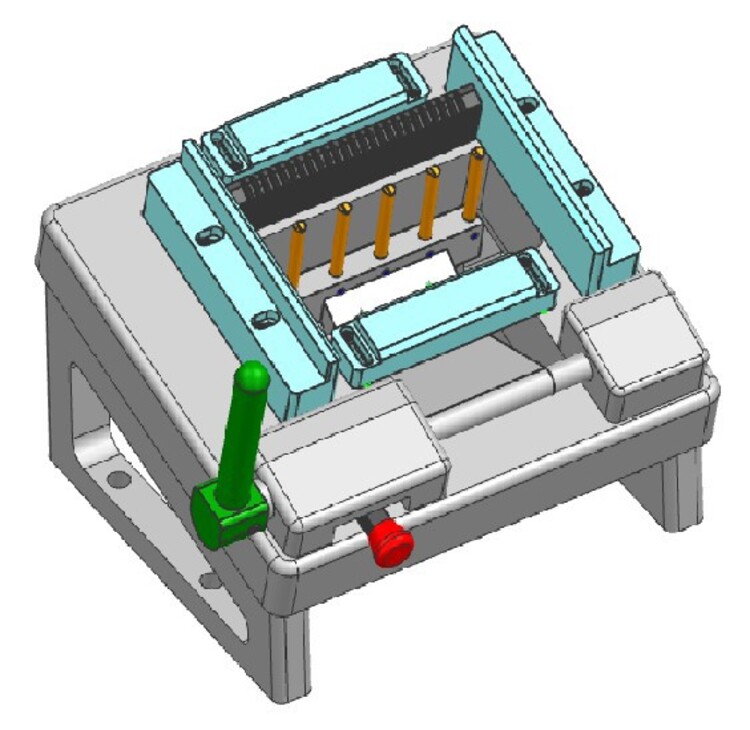
晶圆升降机构是自动控制的,通过音圈电机完成升降运动。如果电机失控此时机构正处于升降运动中,运动部件会上升到高点停不下来顶住外部结构过长时间从而损坏电机。为了避免以上问题,在机构中增加保护措施,确保机构运行的安全性。
晶圆升降系统是半导体制造中重要的工艺设备之一,常规的晶圆升降系统通常有两种:其中一种晶圆升降系统包括:顶针、静电吸盘、组合支架及三个升降气缸,所述顶针通过所述组合支架固定在所述升降气缸上,当所述顶针托载晶圆时,所述升降气缸可以控制组合支架及托载晶圆的所述顶针相对静电吸盘上升或者下降一定的高度。但是,当组合支架使用时间过长时容易损坏,导致顶针,下降的高度不够,使得顶针与晶圆的背面的间距过小,进而导致晶圆上累积的电荷在该顶针区域局部放电起辉造成放电,从而导致晶圆良率损失。
另一种晶圆升降系统包括三个顶针、静电吸盘及三个升降气缸,一个升降气缸控制一个顶针的升降,采用该装置进行晶圆升降时发现,由于顶针的上升受升降气缸压力波动的影响,导致三个顶针的下降高度存在差异,使得其中某个顶针与晶圆的背面的间距过小,进而导致晶圆上累积的电荷在该顶针区域局部放电起辉造成放电,从而导致晶圆良率损失。
- 晶圆扶梯,晶圆读号器,晶圆查看器,晶圆扶梯
- 半导体设备
- 张先生
苏州硕世微电子有限公司为你提供的“佛山定制晶圆扶梯晶圆查看器”详细介绍



