宁波晶圆扶梯晶圆工具扶梯




- 面议
- 2024-06-14 04:37:16
- 晶圆扶梯,晶圆读号器,晶圆查看器,晶圆扶梯
- 张先生 15962404138
- 苏州硕世微电子有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

信息介绍
详细参数
晶圆中200mm 阶段,采用晶圆输送机代替人手操作,排除人为带入的环境污染。随着IC 制造工艺的发展和对环境洁净度要求的提高,国外机器人研究机构在上世纪 80 年代开展了晶圆自动传输系统各部分的关键技术研究,研制出直接驱动电机、位移传感器等关键部件。
晶圆升降机构需要完成升降运动,采用直线电机驱动。直线电机是一种将电能直接转换成直线运动,而不需要通过任何中间转换机构的新颖电机。其代表是音圈电机,音圈的绕制方向与磁场方向垂直,具有喇叭状的辐射磁场,音圈通电后在磁场中会产生力,力的大小与施加在线圈上的电流成比例。电机运动形式可以为直线或者圆弧,主要用在精密仪器上。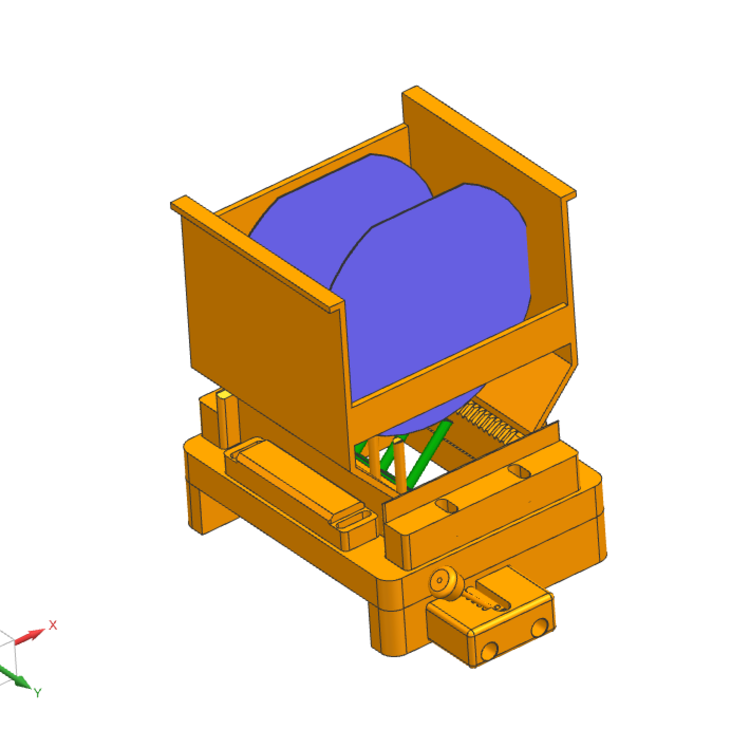
升降机构运动部件是整个机构的核心部件,完成升降运动是传输系统对机构的核心要求。通过的检测装置测量运动部件的位置,反映其运动速度、时间以及重要的定位情况。升降机构的定位精度直接影响晶圆到达工件台上的精度。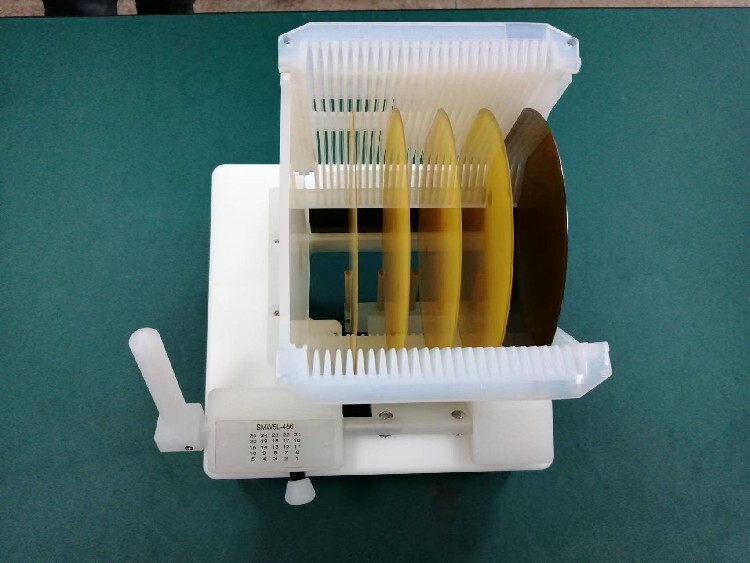
晶圆升降机构中的真空吸附系统是用来吸附和释放品圆,从而进行晶圆的检测和传输,以便实现传输的。机构要求晶圆定位精度高,真空吸附系统在吸附和释放晶圆过程中尽量减小冲击,要求吸附的时候应当缓慢地增加或减小真空压力,使得压力变化为斜坡变化,大限度减小晶圆在真空吸附下精度的损失。
晶圆上表面有定位用的标识,晶圆在预对准阶段确定好了与传输机械手的相对位置,经过升降机构到达工件台吸盘上,为了检测标识位需要其与吸盘相对位置是固定的。因此要求升降机构在圆周方向上不存在转动。同时光栅传感器安装要求光栅尺与读数头相对位置在+0.1mm。防转装置能机构运动圆周方向相对位置,晶圆传输的精度。
晶圆升降系统是半导体制造中重要的工艺设备之一,常规的晶圆升降系统通常有两种:其中一种晶圆升降系统包括:顶针、静电吸盘、组合支架及三个升降气缸,所述顶针通过所述组合支架固定在所述升降气缸上,当所述顶针托载晶圆时,所述升降气缸可以控制组合支架及托载晶圆的所述顶针相对静电吸盘上升或者下降一定的高度。但是,当组合支架使用时间过长时容易损坏,导致顶针,下降的高度不够,使得顶针与晶圆的背面的间距过小,进而导致晶圆上累积的电荷在该顶针区域局部放电起辉造成放电,从而导致晶圆良率损失。
另一种晶圆升降系统包括三个顶针、静电吸盘及三个升降气缸,一个升降气缸控制一个顶针的升降,采用该装置进行晶圆升降时发现,由于顶针的上升受升降气缸压力波动的影响,导致三个顶针的下降高度存在差异,使得其中某个顶针与晶圆的背面的间距过小,进而导致晶圆上累积的电荷在该顶针区域局部放电起辉造成放电,从而导致晶圆良率损失。
- 晶圆扶梯,晶圆读号器,晶圆查看器,晶圆扶梯
- 半导体设备
- 张先生


