海南定制工业机器人地轨,机器人行走轴





- 面议
- 2025-02-21 02:58:44
- 是
- 工业机器人地轨,机器人地轨,机器人第七轴..
- 山东烟台
- 万经理 18011761607
- 广州第七轴智能设备有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

信息介绍
详细参数
相比人工劳动力,工业机器人地轨具有,工作时间长,可以昼夜不停工作,在使用期内几乎不需要保养和维护的优势,满足了自动化生产制造需求。同时可定制编程设计的特点,满足生产制造定制化的需求,拓展了工业制造的模式及范畴。
工业机器人地轨的基础组件具有以下特点:
1、基座:机器人行走轴基座有焊接型和铸铁型两处,焊接适合负载比较轻的场合,铸铁适合负载重的场合。
2、滚轮导轨:矩形滚轮导轨+矩形齿条滚轮导轨(导轨上直接加工齿条成为一体式齿条导轨)传动式机器人行走轴系统。机器人行走轴所用齿条滚轮一体式导轨皆为精密研磨斜齿条精度为:5丝。每个滚轮组合,安装有三个外球面滚轮轴承,分别在矩形导轨的3个工作面上滚动运行。滚轮轴承的外球面进过表面淬硬,有较深的淬硬层,表面硬度为HRC60。
3、齿轮:齿轮组件,带有回差调节机构,方便调整齿轮和齿条之间的啮合间隙。采用这种齿轮组件,将使齿轮齿条传动机构的设计和装配变得简单,实现齿轮齿条传动系统的自动润滑,延长工业机器人地轨的使用寿命,降低故障率。
4、工业机器人地轨安装基础:
(1)可采用方钢上焊接钢条作为安装基础,钢条上铣出导轨安装基准;
(2)安装调试的时候,要确保两根方钢上的安装基准面的平行度;
(3)机器人安装底座采用高强度钢板,把滚轮组合,伺服电机和机器人的安装基准面和孔位加工出来,每运行8000小时后进行的维护工作。
随着机器人的广泛应用,工业机器人地轨作为机器人的辅助行走机构也备受企业的关注,在一些工作周期很长、作业范围大、需要多台机器管理一个工位的场合很适合应用。在工业应用中,由于安装的环境不同,对机器人地轨技术要求也不一样,相应的技术配置、材质、价格也会有所不同。
工业机器人地轨是通过它的控制系统来控制机器人的移动的,机器人安装在行走轴的滑座上,通过控制系统可按路线实行移动。机器人的移动就是第七轴上机械手移动小车的在直线方向上的移动,这是通过操作面板和显示屏进行编辑的,在有效行程范围内,基本速度在1.2m-1.8m之间,可按客户要求调试,速度都是可调的;而精度是由编码器的检测再通过伺服系统控制电机来实现的,精度在±0.05mm范围内;机器人与第七轴的信号接口及机床系统接口是用数字信号进行传输的,可其稳定性和可靠性。
工业机器人地轨的应用可以实现高强度、、的作业,不但成功将人力从这些繁重的作业中解放还能提高生产工艺和生产效率,还实现了工业的自动化生产制造。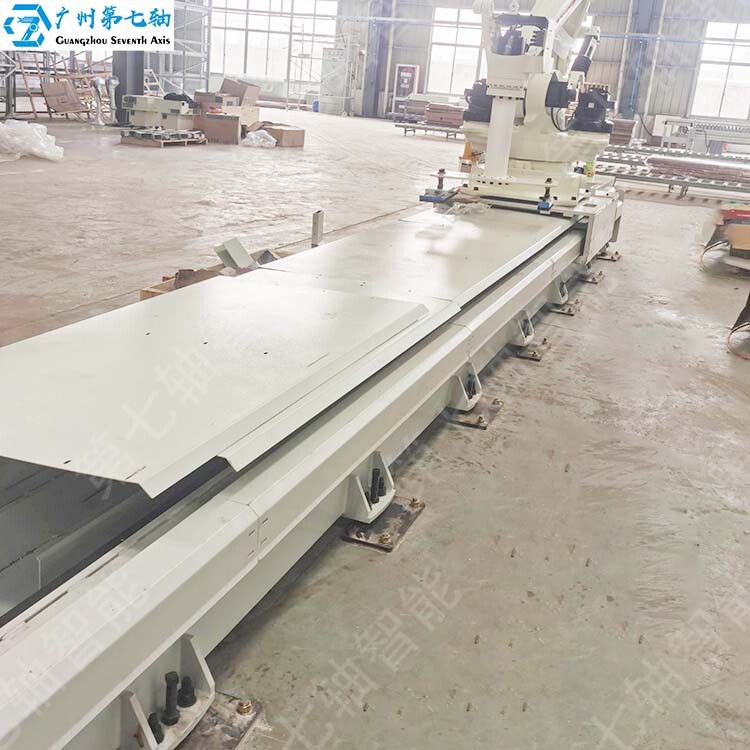
工业机器人地轨是综合了计算机、控制论、机构学、信息和传感技术、人工智能、等多学科而形成的高新技术,在当代十分活跃。在汽车装配时,工业机器人地轨可以根据现场工艺的需求配合不同工艺需求进行装配,可满足生产线大小批量的多样生产要求;可以缩短产品改型换代的周期,若要更换工装需求,只需重新根据产品设计相应工装夹具,更改调用相应的程序命令,即可实现快速切换工装需求应用;还可根据现场工艺需要配备不同工艺需求装配,更好下达和控制生产计划,工业机器人地轨可重复性作业,生产节拍固定,永远按照编程的指令去动作,装配作业生产周期明确,更好的控制装配产量;而且应用工业机器人地轨于汽车装配精度和稳定性更高,在恶劣的作业环境也能准确移动机器人到设定的工位完成抓取等作业。
- 工业机器人地轨,机器人地轨,机器人第七轴..
- 铸造机械设备
- 山东烟台
- 万经理
- 是



