潍坊桁架机械手规格,机器人机械手桁架,可按需定制





- 面议
- 2024-10-17 09:42:57
- 桁架机械手,可按需定制
- 湖北武汉
- 万经理 18011761607
- 广州第七轴智能设备有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

信息介绍
详细参数
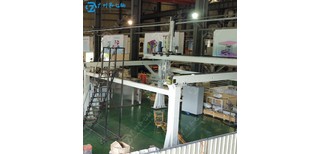
桁架机械手是一种建立在直角X、Y、Z三坐标系统基础上,对工件进行工位调整,或实现工件的轨迹运动等功能的全自动工业设备。它以主体、控制系统、驱动系统三大部分组成,通过龙门式结构设计和各种工业控制器如PLC、运动控制、单片机等,实现各轴之间的联合运动,以此实现一整套的全自动作业流程。
广州第七轴厂家设计制作的桁架机械手由结构框架、X轴组件、Y轴组件、Z轴组件、工装夹具以及控制柜,六部分组成。
一、桁架式机械手的结构框架,主要由立柱等结构件组成,其作用是将各轴架空至一定高度,多由铝型材或方管,矩形管,圆管等焊接件构成;
二、X轴组件、Y轴组件、Z轴组件,三个运动组件为桁架机械手的核心组件,其定义规则遵循笛卡尔坐标系。各轴组件通常由结构件、导向件、传动件、传感器检测元件以及机械限位组件等五部分组成。
(一)桁架机器人结构件通常由铝型材或方管,矩形管,槽钢,工字钢等结构组成,其作用是作为导向件、传动件等组件的安装底座,同时也是桁架式机械手负载的主要承担者。
(二)导向件,常用有直线导轨,v型滚轮导轨,U型滚轮导轨,方型导轨以及燕尾槽等常用导向结构,其具体运用需根据实际使用工况以及定位精度决定。
(三)传动件,通常有电动,气动,液压三种类型,其中电动有齿轮齿条结构,滚珠丝杆结构,同步带传动,链条传动以及钢丝绳传动等。
(四)传感器检测元件,通常两端采用行程开关作为点限位,当移动组件移动至两端限位开关处时,需要对机构进行锁死,防止其超程;此外还有原点传感器以及位置反馈传感器。
(五)机械限位组,其作用是在点限位行程之外的刚性限位,俗称死限位。
三、工装夹具,根据工件形状大小材质等有不同形式,如:真空吸盘吸取,卡盘夹取,托取或针式夹具插取等形式。
四、控制柜,其相当于桁架机械手的大脑作用,通过工业控制器,采集各传感器或按钮的输入信号,来发送指令给各执行元件按动作去执行。
桁架机械手具有以下优点:
1、采用高强度结构钢,整体强度高,不易振动摇晃。滚轮导轨运动机构,承载能力,刚性。
2、安装调整要求低,相比于繁杂的关节机器人,结构设计便于人员理解、操作简单、维护方便。
3、寿命长,不会像普通直线导轨滑块易受加工精度及润滑影响失效损坏。
4、便于维护,导轨极易维护,即使损坏更换也极其方便。
5、可配置为全闭环系统,即会实时检测机械手控制系统发出指令和实际位置是否一致(如非全闭环、齿轮损坏等实际不移动不准确,而控制系统无法感知),Z轴检测到往下掉时可机械锁止,防止发生安全事故。
6、,相对于同等负重的关节机器人,桁架机械手的造价成本更低。
7、桁架机械手一般架在设备上方,不占用地面空间,更利于车间规划和作业的便利性。
这些优点使桁架机械手成为自动化生产线和工业领域的重要工具,提高了生产效率、质量和安全性。
- 桁架机械手,可按需定制
- 铸造机械设备
- 湖北武汉
- 万经理
推荐信息
-
 深圳定制变位机,焊接变位机翻转台,变位机生产厂家
深圳定制变位机,焊接变位机翻转台,变位机生产厂家 -
 南岸工业桁架机器人,龙门上下料机械手,非标定制厂家
南岸工业桁架机器人,龙门上下料机械手,非标定制厂家 -
 普陀工业焊接变位机,水平回转伺服变位机,机器人变位机供应
普陀工业焊接变位机,水平回转伺服变位机,机器人变位机供应 -
 长宁耐用机器人第七轴,重载行走轨道,机器人地轨生产厂家
长宁耐用机器人第七轴,重载行走轨道,机器人地轨生产厂家