信阳生产桁架机器人,自动化桁架机械手臂,非标定制厂家





- 面议
- 2025-02-11 06:43:16
- 桁架机器人,非标定制厂家
- 山东潍坊
- 万经理 18011761607
- 广州第七轴智能设备有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

信息介绍
详细参数
桁架机器人操作步骤
1、进入桁架机器人安全区域之前,请确保关掉主电源以及气压源,并将气、电源接头卸下。在操作桁架机器人之前务必要注意检查电器控制箱内是否有水、油进入,若电器受潮,切勿开启设备,并且要经常检查供电电压是否符合设备运行,线路是否正常;
2、验证电机的转方向是否一致,然后打开电源;
3、在桁架机器人需要拆除的时候,其中对关掉射出机电源、关掉机械手电源,关掉机械手气压源;
4、洩除空压。放松引拔气缸固定板固定螺丝,并移动手臂,移动缓冲器座,使其靠近手臂;
5、旋紧引拔气缸固定板,让手臂不能移动,将旋转安全螺丝锁好,使桁架机器人不能旋转等。
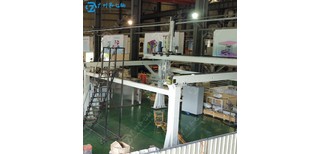
伴随着工业技术发展,机器人替代人工变成了工业制造业的主流,当中桁架机械手在机床上下料、仪表及轻工行业、小型零部件的输送及自动装配、自动化生产等多个方面取得广泛应用。桁架机器人与数控机床相互结合应用在之后会变得越来越普遍。
桁架机器人具有一定的柔性,可以减少更换产品的生产辅助时间,进而减少交货期。而且桁架机器人还可以改善作业环境,降低安全隐患,为企业发展实现人性化生产经营管理。
时代发展趋势加快,电气自动化早已经替代了人们很多的工作中,桁架机器人相当于人的手臂,仅仅桁架机器人是靠设备工作中的,按照定编一套程序流程,就能保持自动化技术实际操作,简易方便快捷平稳,深受用户的喜爱。
桁架机器人的控制核心通过工业控制器(如:PLC,运动控制,单片机等)实现。通过控制器对各种输入(各种传感器,按钮等)信号的分析处理,做出一定的逻辑判断后,对各个输出元件(继电器,电机驱动器,指示灯等)下达执行命令,完成X,Y,Z三轴之间的联合运动,以此实现一整套的全自动作业流程。
桁架机器人是一种建立在直角X,Y,Z三坐标系统基础上,对工件进行工位调整,或实现工件的轨迹运动等功能的全自动工业设备。桁架机器人采用了PLC控制技术以及伺服运动控制技术,使机械手效率更高、使用范围更广、工艺更加稳定方便。整个工艺流程由机械手控制系统自动完成,可实现智能检测、自动报警等功能。可以在一定范围内进行任意组合,可实现对车床、加工中心、插齿机、电火花机床、磨床等设备的自动化生产线。
- 桁架机器人,非标定制厂家
- 铸造机械设备
- 山东潍坊
- 万经理



