湖南工业机器人第七轴,机器人行走轨道






1/6
- 面议
- 2025-01-14 02:10:44
- 机器人第七轴,机器人地轨,机器人行走轨道..
- 广东深圳
- 万经理 18011761607
- 广州第七轴智能设备有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

取消
信息介绍
详细参数
机器人行走轴是如何带动机器人到不同的工位作业的呢?
机器人第七轴通过其控制系统控制机器人移动,机器人安装在行走轴滑台上,通过控制系统即可按照路线移动,机器人的移动就是第七轴上机械手移动小车的在直线方向上的移动,基本速度在1.2m-1.8m之间,可根据客户要求调试,而精度则是由编码器的准确检测再通过伺服系统控制电机来实现,精度在±0.05mm范围内;机器人与第七轴的信号接口及机床系统接口是用数字信号进行传输的,可其稳定性和可靠性。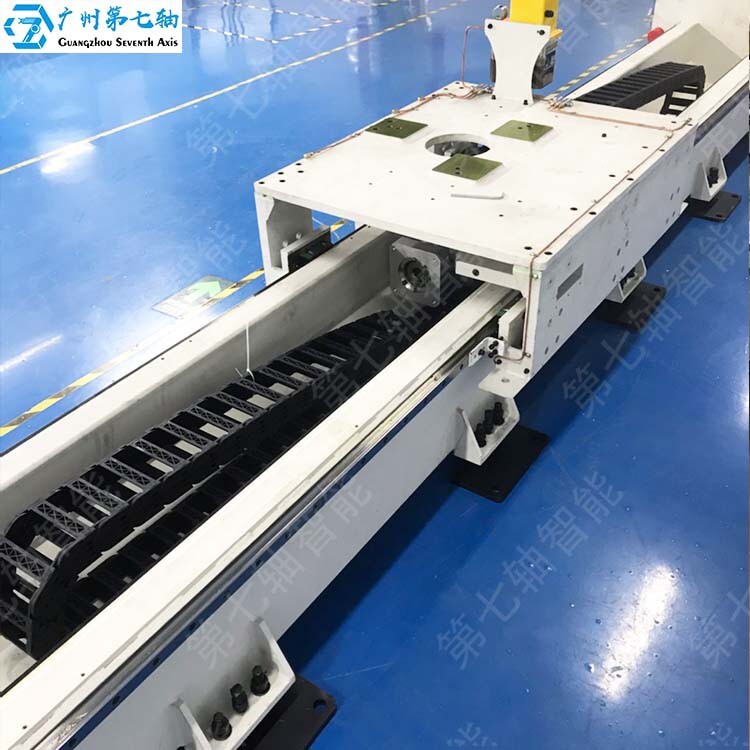
机器人第七轴又叫机器人地轨、机器人外部轴,机器人第七轴未地面式系列,轨道基座采用高强度型钢与优良钢板焊接而成,大限度的保障其精度,有效避免变形和振动的情况出现。镶嵌直线滑动导轨和进口齿轮齿条等组成,并根据客户需求装有润滑系统和风琴护罩,能持续实现自动润滑和防尘除削等功能。
机器人第七轴又称机器人地轨,是能够满足工业机器人在多个工位间移动作业的行走机构,机器人第七轴配合工业机器人作业,为机器人提供水平方向的移动。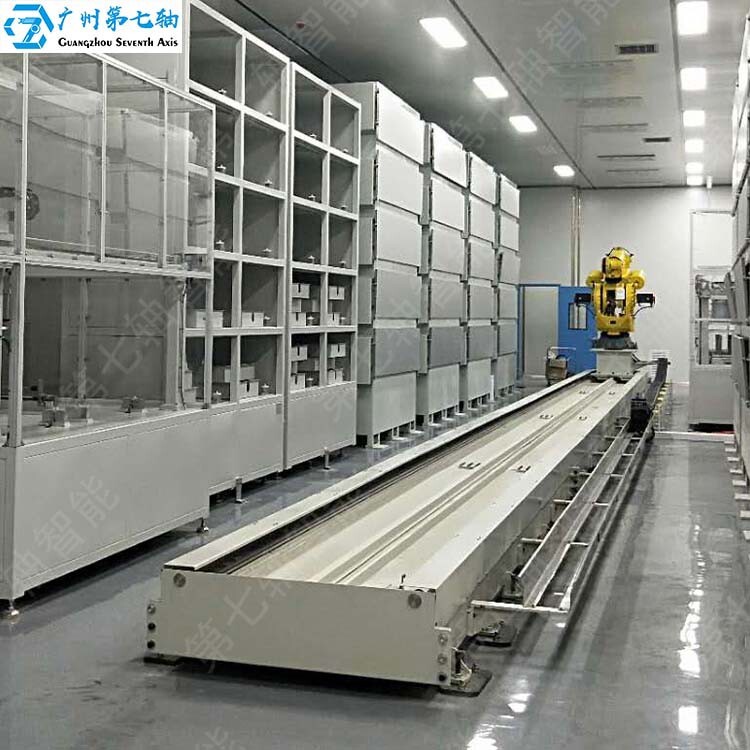
机器人第七轴使用电机驱动,整体刚性强,工作范围大,具有结构紧凑、定位精度高、响应速度快、运行平稳等特点。
机器人第七轴的性能优势
1、可根据实际使用的需要,对有效行程进行调整(定制)。
2、运动由机器人直接控制,不需要增加控制系统。
3、机器人第七轴运行速度快,有效负载大。
4、防护性能好,可适用于机床上下料、点焊、涂胶、搬运等作业。
5、机器人第七轴结构简单,易于维护。
6、使用伺服马达控制,通过精密减速机、齿轮、齿条进行传动,重复精度高。
机器人第七轴是在行走轴导轨上安装一台工业机器人,使用电机驱动,具有重复定位精度高、响应速度快、运行平稳、可靠等特点,并设计了防尘罩,保护导轨、直线轴承以及齿条等运动部件,大大提高了可靠性和使用寿命。
- 机器人第七轴,机器人地轨,机器人行走轨道..
- 铸造机械设备
- 广东深圳
- 万经理
广州第七轴智能设备有限公司为你提供的“湖南工业机器人第七轴,机器人行走轨道”详细介绍



