利用labview为风机系统控制软件测试开发硬件在环仿真器
概述:使用NI TestStand、LabVIEW实时模块、LabVIEW FPGA模块和NI PXI平台创建用于西门子风机控制系统的嵌入式控制软件发布的硬件在环(HIL)测试系统。
由于我们的软件定期发布控制器的软件新版本,我们需要测试软件,验证这些软件将会在风力站的环境下可靠执行。在每个软件发布时,我们在现场使用软件之前,需要先在工厂接受性能测试。这个全新的测试系统让我们能够自动化这个流程。
从过去系统中学到的经验
我们之前的测试系统是在10年前开发的,它基于另一个软件环境和PCI数据采集板卡。测试系统体系结构和性能无法满足我们对全新的测试时间和扩展性的需求。维护也十分困难,并且不能自动化完成有效的测试。它还缺乏对测试结果自动生成文档和测试的可跟踪性,不提供所需的远程控制功能。此外,过去的HIL测试环境不支持多核处理,因此我们无法利用新多核处理器的计算能力。
未来系统的决定
在评价可用的技术之后,我们选择了LabVIEW软件和基于PXI的实时现场可编程门阵列(FPGA)硬件,开发我们全新的测试解决方案。我们相信这个技术会带来灵活性和可扩展性,满足我们未来的技术需求。同时,我们从NI提供的服务与产品质量中,建立了对解决方案的信心。
由于我们在测试内部系统中并没有深入的开发经验,我们将开发外包给位于丹麦的CIM Industrial Systems A/S公司。我们选择CIM Industrial Systems A/S是因为他们具有测试工程能力和欧洲多的LabVIEW认证架构师。CIM成功开发了这个项目,我们对得到的服务感到十分高兴。
灵活的实时测试系统体系结构
全新的测试系统通过在LabVIEW实时模块系统中,运行组件仿真模型,仿真实时风机组件的行为,为被测系统提供仿真信号。
图2:西门子风力测试系统体系结构
主计算机包含直观的LabVIEW用户图形界面,能够方便地通过在面板中移动组件进行调整。Windows操作系统应用程序与两个不兼容实时任务的外部仪器进行通信。
图3:主计算机具有直观的LabVIEW用户图形界面。
在主计算机上的软件通过以太网与位于PXI-1042Q机箱中的LabVIEW实时目标进行通信。LabVIEW实时模块运行通常包含20到55个并行执行的仿真DLL的仿真软件。这个解决方案能够调用使用几乎所有建模环境开发的用户模型,例如NI LabVIEW控制设计与仿真模块、The MathWorks, Inc. Simulink®软件或是ANSI C代码。我们仿真循环的典型执行速率是24 ms,为满足未来处理能力扩展需求提供了大量裕量。
用于定制风力涡轮协议和传感器仿真的FPGA板卡
由于缺少现有标准,在风机中使用的定制通信协议很多。使用基于NI PXI-7833R FPGA多功能RIO模块和LabVIEW FPGA模块,我们能够与这些协议进行通信并仿真。除了协议交互之外,我们使用这个设备仿真磁性传感器和三相电压电流仿真。其他的FPGA板卡与NI 9151R系列扩展机箱连接,进一步提高了系统通道数。
全新测试系统的优点
相比上一代解决方案有许多优点。由于系统的模块化特性,进行改进、修改和进一步开发十分简单。被测系统可以在无需测试系统体系结构任何变化的情况下进行快速替换。远程控制功能和系统的简单复制让我们能够在需要进行扩展时,灵活地将系统复制到其他站点。
仿真器为环境提供了在实验室中验证新软件发布和测试特殊解决方案的能力。它还给了我们测试我们正在研究的新技术和新概念的工具。

利用labview为太阳能车开发遥测系统
概述:使用1组NI CompactRIO控制器与8槽式机箱,监控车辆的电压、电流、温度,与速度,再透过2.4 GHz数据机,将资讯无线传送至太阳能车后方的追踪车辆。
遥测(Telemetry)
WSC 与其他太阳能车赛不同之处,乃是团队完成达尔文(Darwin) 到阿德雷得(Adelaide) 共3,000 公里的距离;亦表示比赛期间可能随时发生问题,甚至影响车辆能否完成赛事。使用CompactRIO 可重设机箱与NI LabVIEW 软体,我们开发的摇测系统可监控、记录,并传输资料,以随时反应太阳能电池的状态(如上图1 )。受监控的资料可触发警示,在问题发生之前避免之;因此该笔即时资料可协助团对随时拟定佳对策,以缩短除错时间。同时系统亦将监控并记录驾驶的动作,以利赛后分析。
研发
虽然太阳能车本身的机械与电力资料,即为搜集与分析要点,但由于电子资料才是打造车辆的关键比赛要素,所以我们额外注重电子资料。我们所搜集的资料,包含设计阶段的电池与太阳能电池,还有电池的体积与其效能曲线均有。在赛程中搜集到的即时资料,有助于我们佳化车辆的性能,亦可比较车辆实际规格与设计规格之间的差异。另外,策略团队则使用此资料搭配天气预测,以计算出理想的赛程速度。我们并透过CompactRIO 内建记忆体而记录所有资料,以利赛后分析并供未来改进之用。
使用CompactRIO 与可重设机箱
因为CompactRIO能在可客制化输入通道上整合即时资料撷取功能,亦可记录并传输资料,所以我们选用CompactRIO。而NI cRIO-9104 - 8槽式机箱可安装任何必要模组,以满足我们的监控需求。透过多款NI模组,我们可随着专案发展而调整机箱,并着重于太阳能车的不同面向。NI cRIO-9014 - Real-Time控制器另内建记忆体与多种I/O,可提供弹性介面与次要的资料储存媒体。
我们的客制化机箱包含1组SEA cRIO-GPS+模组,可即时提供车辆位置;1组NI 9870序列介面模组,具备RS232介面,可撷取电池监控系统的资料;1组NI 9401数位I /O模组,可透过马达控制器端点取得车辆速度,并输出资料;4个NI 9219类比I/O模组,可监控火星塞、刹车、电流,与太阳能电池阵列的电压;还有1个NI 9211热电偶模组,可感测车辆周围的温度。我们另透过NI 9219通用类比I/O模组,以高度与解析度监控多种资料,包含电压、电流、温度,与电阻。
利用LabVIEW FPGA Module 进行程式设计
使用LabVIEW FPGA Module即可迅速且轻松设计此系统。另外,Express VI具备捷径功能,可让使用者迅速变更程式以满足需求。此外,我们在启动CompactRIO时随即执行程式,让整个系统成为无线架构,而不需实际接至系统再手动开始程式。我们虽属业余团队且程式设计经验有限,但直觉且图形化的图示与接线,都让我们能加快程式设计的速度且趣味盎然。因为并非所有模组都支援CompactRIO的Scan Mode,所以我们透过FPGA程式设计模式,整合了共8个模组。我们检视由追踪车即时搜集的资料,再根据公式化的程式拟定比赛策略(图2)。
图2. 追踪车上的即时资料
应用
在专案设计阶段,我们使用CompactRIO 控制器记录太阳电池的效能,以建立电池于不同气候条件下的效能曲线。我们连接电池与系统,以了解不同温度下的放电情形,并于每次试驾时记录驾驶的动作,以协助团队判别驾驶行动是否正确。
因为车辆完全由太阳能供电,我们将电子设备的耗电量降至低,让马达获得大部分的电力,才能完成赛程。客制化的8 槽式机箱可撷取如GPS、电池资讯、太阳能电池状态、马达效能,与驾驶动作的资料。接着将所有资料储存于cRIO-9014 – Real-Time 控制器内建的2 GB 记忆体,同时透过LabVIEW VI 将资料格式化为字串,再透过低耗电的2.4 GHz 无线电数据机,将资料传输到追踪车上(图3)。
图3. 遥测系统的程式区块图
Real-Time 控制器具备足够的储存空间,追踪车上亦装备1 组笔记型电脑。策略团队在追踪车上分析资料,并参考如道路、驾驶,与天候状况的外部因素,以决定车行速度。
完成所有试驾之后,我们接着分析资料并微调太阳能车的机械元件,如调整车轮、转向灵敏度、悬吊,与胎压,以提升太阳能车的性能。透过LabVIEW,我们可模拟澳洲所有的可能天候状况,这样我们更能有效评估太阳能阵列所提供的电力与功率。此外,我们也会在赛事过后分析所得的资料,以进一步强化新一代的太阳能车。
结论
因为我们在这个专案使用即时监测系统,且太阳能车所能提供的资料范围太过广泛,所以我们初并无法确定主要的焦点为何。随着专案的进展,我们于竞赛与设计阶段,均透过CompactRIO 绘制出电池在不同温度下的放电率图表,并借以了解自制太阳能矩阵的效能。本专案从设计、实际比赛,到后续分析的所有阶段,CompactRIO 实在助益良多。我们成功使用CompactRIO 为太阳能车开发了监控系统,且针对未来的更多太阳能专案,我们亦准备继续使用相同的机箱与控制器。

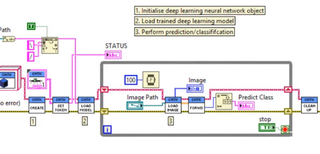
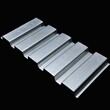
利用下一代医学成像技术以及PXI模块化仪器系统与NI LabVIEW进行进展性癌症研究
概述:使用OCT技术与授予专利的光源技术,并通过带有32个PXI-5105数字化仪的256同步通道的高速(60Ms/s)数据采集系统予以实现。
OCT是一种非入侵式成像技术,它提供半透明或不透明的材料的表下、断层图像。OCT图像使我们可以以与一些显微镜相近的精度可视化地展现组织或其他物体。OCT越来越受到研究人员的关注,因为它具有比核磁共振成像(MRI)和正电子发射型断层成像(PET)等其他成像技术高很多的分辨率。此外,该方法不要求我们作其他准备,而且对于患者非常安全,因为我们使用的激光输出能量非常之低并且无需使用电离辐射。
OCT利用一个低功耗光源及其相应的光反射以创建图像,该方法类似于超声,但我们监测的是光波,而不是声波。当我们将一束光投射在一个样品上,其中大部分光线被散射,但仍有小部分光线以平行光的形式反射,这些平行光可以被检测到并用于创建图像。
别系统概览
我们的任务便是利用光学解复用器创建一个高速傅立叶域OCT系统,以支持来自以192.2 THz为中心频率、频率间隔为25.0 GHz的宽带入射光(波长为1559.8 nm)的256个窄频带的分隔。频谱分离使得PXI-5105数字化仪的256个高速模数转换器(ADC)通道能以60 MS/s的采样率进行数据采集,并对所有的频带进行同步检测。
我们的系统包含32块8通道的PXI-5105数字化仪,它们分布在三个18槽的NI PXI-1045机箱上。我们利用NI PXI-6652定时与同步模块和NI-TClk同步技术,实现不同机箱上的数字化仪的同步,它提供了数十皮秒精度级的通道间相位同步性。我们选用PXI-5105是因为其高通道密度——每块板卡八个输入通道,这样使得256个高速通道的系统保持较小的外形尺寸。当我们完成数据采集之后,我们利用LabVIEW进行数据处理和可视化展示。
利用傅立叶域OCT系统中的光解复用器充当频谱分析仪,实现了每秒六千万次轴向扫描的OCT成像。利用一台共振扫描装置进行帧速率为16 kHz、每帧1400 A-线和3毫米深度范围的左右扫查,我们的OCT成像展示了23 µm的精度。
系统深度描述
在我们的系统中,所采用的光源是一个宽带超发光二极管(SLD,由NTT电子提供原型产品)。我们利用一个半导体光放大器(SOA,来自COVEGA公司,BOA-1004型)放大该SLD的输出光信号,并利用耦合器(CP1)将其等分导入到样本支路和参考支路。我们调整SOA1的输出光信号强度,使得样本信号的功率为9 mW,以满足ANSI的安全限制。我们的系统利用一个准直透镜(L1)和一个物镜(L2),将样本支路光信号导入到采样点(S)。我们使用一个共振扫描装置(RS、光电产品、SC-30型)和一个电镜(G,剑桥技术出品,6210型)扫描采样点的光束。我们的系统利用光照明光学收集来自采样点的后向散射或后向发射的光信号,并利用一个光循环装置C1将其导入至SOA2(来自COVEGA公司,BOA-1004型)。我们通过一个耦合器CP2(耦合比为50:50)整合SOA2的输出信号与参考光信号。该参考支路由光循环装置C2、准直透镜L3和参考反射镜RM组成。
我们的系统利用两只光解复用器(OD1与OD2)分离CP2的输出信号,以实现平衡检测。它利用平衡图片接收装置(来自New Focus公司,2117型)——共有256个图片接收装置,检测来自这两个OD的具有相同光频率的输出信号。它利用前述快速多通道ADC系统的32块PXI-5105数字化仪,检测来自图片接收装置的输出信号。所采集数据在单次采集过程中存储于数字化仪的板载深度存储器中,然后传输至计算机供分析。
就同步检测干涉频谱而言,OD-OCT与SD-OCT相似。其差别在于OD-OCT同时在不同频率以数据采集速率检测整个干涉图谱,而不是像SD-OCT那样——在某个时间跨度内累计输入到CCD检测装置中。因而,它根据数据采集系统的数据采集速率——在现有系统中该速率高达60 MHz——来确定轴向扫描速率。共振扫描装置的16 kHz速率确定了帧速率。我们仅使用了一个扫描方向进行数据采集(50%的占空比),从而得到每帧的采样时间为31.25 μs。该系统在每帧中获得1875次轴向扫描;然而,由于共振扫描装置的左右扫查呈高度非线性,我们仅使用了1400次轴向扫描,舍弃了475次轴向扫描。
研究结果
我们将动态范围定义为点扩散函数(PSF)的峰值与样本支路畅通时的背景噪声间的比值。我们根据结果估计,动态范围在各种深度下均约为40 dB并随着深度加深略有下降。OD-OCT的一个技术优势在于AWG的每个通道所检测的频带宽度小于25 GHz的频率间距。40 dB的动态范围基本足够生物组织的测量。
我们利用中性密度滤光镜将发射光衰减了39.3 dB。粗实曲线是在阻塞样本光信号的情况下测量所得的背景噪声。由这些数值确定的敏感度按照右手侧的垂直刻度标示。
图像的渗入深度约1毫米,浅于通常利用SS-OCT或SD-OCT获得的2毫米渗入深度。这是由低敏感度决定的。为得到一幅3D图像,需要大量的OCT截面。受限于存储器的大小,我们把采样率降至10 MHz。
NI TestStand 成果斐然
新的功能测试系统协助我们在紧迫的时间压力下完成工作,将新产品的设计从概念阶段带入制造阶段。NI TestStand 为我们的 LabVIEW 测试模块制造了一个模块化、可重复使用的测试架构,NI TestStand 对我们来说非常实用。从的角度来看,我们现在可以在的短时间内就开发完成测试系统,因为与软硬件开发有关的大部分风险都被移除了。我们初期的训练投资成本也因为开发这个的时间缩短,而且收回了成本。在未来的开发中,因为我们的工程师已经习惯使用这些工具,所以我们预期开发的时间会缩短 30 %。
撷取的资料暂时储存在CompactRIO 的内部快闪硬碟中,然后透过无线连结自动下载到主要伺服器中,资料在主要伺服器中处理、与更多复杂的警报参数比较,然后储存在资料库中。如果无法无线连结到伺服器时,使用者可以透过短程、点对点的无线连结(使用者靠近机器铲以建立连结) 连上并手动下载资料;接上乙太网路连接线,或是在CompactRIO的USB 插槽上插入随身碟,资料便会自动上传。<0}
资料一旦处理储存好了,就可以供下列之用:使用者视觉化、分析、手动处理,以及在伺服器上进行趋势管理,或是有网路可存取资料库的电脑,也可进行趋势管理。所有的组态、资料移转、处理、视觉化与分析软体都充分内建在LabVIEW 里。
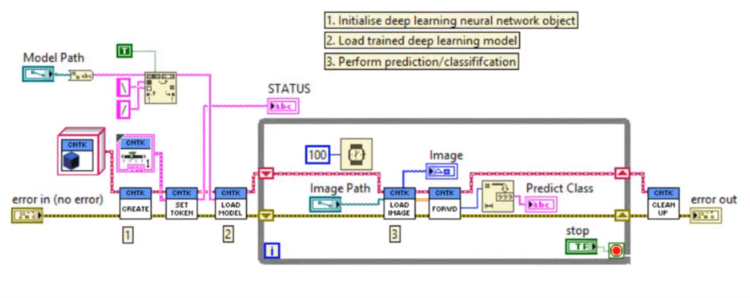
使用labview、CompactRIO开发嵌入式涡轮增压器性能检测系统
概述:与之前的解决方案相比,使用NI CompactRIO开发嵌入式涡轮增压器检测系统,提供更高的精度、准确性和稳定性。
我们用基于CompactRIO的嵌入式系统替换了现有的可编程逻辑控制器(PLC)检测系统,从而提高了控制的精度级别。与之前的PLC解决方案相比,新系统具有多个优势,包括的阀门控制和更的温度、压力和转速测量。由于CompactRIO具有更高的性能和稳定性,新系统能够快速地完成例如涡轮增压器预备性能检测和信息分析等功能,从而可以确保产品的稳定性。
在开发时间和资源分配方面,需要一个人进行硬件设计两个月,一个人进行软件开发三个月以及一个人进行调试和检测一个月。
基于CompactRIO的全新检测系统可以测量用于船只引擎驱动的涡轮增压器的性能,。天然气、空气和汽油的输入量需要根据安装的阀门进行调节。根据调节后的量,涡轮增压器、涡轮映射和压缩机映射的效率使用关于涡轮增压器的压力、温度和速度值进行测量。
CompactRIO模块
涡轮增压器性能中重要的变量包含温度、压力和转速。系统组件包含多个NI C系列模块,包括NI 9217 RTD模拟输入模块测量电阻温度传感器(RTD)温度、NI 9211热电偶输入模块测量热电偶温度、NI 9203数据采集模块测量压力和电流、NI 9423漏极数字输入模块测量转速。此外,还采用了NI 9265同步更新模拟输出模块作为系统和模拟输出值的外部接口,NI 9425漏极数字输入模块和NI 9476源数字输出模块用于数字I/O值。检测系统由系统操作员通过用户界面进行控制。监视外部系统使得用户可以控制和管理整个系统。
结论
涡轮增压器是车辆引擎的重要部分,其性能直接影响整个引擎的性能。对涡轮增压器性能进行适当的测试是确保终产品质量的关键步骤。以前的PLC系统无法提供所需的精度。使用基于CompactRIO的全新检测系统替换PLC系统节省了空间,并且提供了更高的精度、更高的分辨率和更好的性能。此外,由于系统开发员熟悉CompactRIO的开发方法,可以在短时间内让系统开始运行,这样节省了时间和开发资源。
使用LabVIEW测量内燃机气缸压力
概述:基于LabVIEW软件控制的DAQ板卡,开发出OPTIMIZER——一款灵活、经济的基于PC的气缸压力测量分析系统。
背景
内燃机的性能,取决于许多因素。对于给定压缩比的情况,佳马力和发动机扭矩会出现在以下情况:
每个气缸的进气口和进气阀的进气量均达到大
燃料/空气处于适当比例
燃料和空气充分混合
调整点火提前量,避免初始爆震
由于是燃料/空气混合物的燃烧产生的压力产生了发动机的扭矩和动力,所以在发动机研发中重要的检查参数就是在压缩和做功冲程中的气缸压力大小及其定时。进气歧管的台架测试是在恒流情况下记录一定压降下的气流情况。但当安装在发动机上后,进气歧管的气流就变成了受活塞运动、进气阀面积、气阀定时和重叠时间以及流道形状影响的非恒流过程。这些参数的共同作用,往往会导致多缸发动机不同气缸进气差异。
优化发动机性能的步就是设计进气歧管和气阀系以大限度的给每一个气缸提供等量空气。对于给定的压缩比和进气口温度,操作者可以通过测量点火之前压缩冲程中的气缸压力来获得进气信息。因为油气混合物的燃烧是一个复杂的反应过程,牵涉到很多气缸的几何因素以及其它因素,如油气混合情况、汽油辛烷值、燃料当量比、发动机温度、空气温度和湿度,以及点火时间等—— 调整这些参数,以获得佳的性能,将是一个相当大的挑战。
通过观察气缸压力测量值以及峰值压力相对活塞顶死中心(Top-dead-center, TDC)的位置,发动机技术人员可以迅速将发动机调校到佳性能。由燃烧质量分数可见,对于大多数传统发动机而言,如果峰值压力出现在TDC之后12到15度,并且燃烧发生在TDC附近的等容阶段时,发动机将表现出佳性能。但在给定压缩比和燃油辛烷值情况下,为了达到佳性能所采取的点火提前可能会因为严重的火花爆击现象而导致气阀过热。因此,在性能优化过程中,发动机技术人员需要检测TDC之后的10和40度之间火花爆击的气缸压力。如果检测到爆震,点火提前取消,以避免活塞受损。
使用LabVIEW和PXI进行东海大桥结构健康监测
概述:部署一个坚固的PXI系统来监测环境对大桥产生的影响,进行实时计算以确定大桥的即时结构健康状况,并将数据储存,进行离线处理。
东海大桥作为中国跨海大桥,耗资12亿美元,于2005年完成通车。六车道的大桥将上海与洋山岛连在了一起,大桥全长32.5千米,并设计成S形以避开台风和海浪区,以车辆安全行驶。
我们搭建了一个结构健康监测(SHM)系统,它能够提供大量的数据来评估大桥损坏和退化程度、结构性能状况、对于突发性灾难的反应。利用这些数据可以对桥梁的设计和建造技术进行研究。
我们使用基于NI PXI的数据采集系统,源于其良好的坚固性和小巧的体积,适用于放置在大桥的保护区域中。事实证明,系统在安装完毕后成功地克服了大桥所遇到的湿度、灰尘、震动和化学腐蚀等各种难题。使用LabVIEW,工程师能够进行重要的实时分析,同时,能够对大桥上大量的传感器产生的信号进行离线处理。
硬件系统设置
对东海大桥实施监控需要使用超过500个传感器,在大桥每段都放置了加速度计和FBG光学传感器,来采集环境激励所引起的频率响应。同时,大桥还配备了风速仪和压式传感器,以记录频率响应所对应的环境条件。大桥每一段还设有一个数据采集站,配备NI PXI-4472B动态信号采集卡(DSA)从周围的加速度计采集相关数据。
另外,我们使用NI PXI-6652同步模块和 NI PXI-6602计数器模块,以及NI PXI-8187机箱控制器,来解决数据采集的同步问题。
在对东海大桥上的系统进行设置时,我们给每个PXI机箱都安装了一个GPS,使用脉冲每秒(PPS)和IRIG-B定时信号分别进行信号同步和时间标识。PPS每秒传输一千万脉冲,为每个机箱提供采样基准时钟。这使得采集模块可以在100纳秒的分辨率下对大桥上所有设备的通道实现同步采样。
本公司,是一家以主营LabVIEW开发,LabVIEW项目,LabVIEW编程,LabVIEW解密企业。北京瀚文网星科技有限责任公司,是一家以LabVIEW(虚拟仪器)为主要技术手段的开发公司。其服务领域包括:汽车、通信、航空、半导体、电子设计生产、过程控制和生物医学等各领域。涵盖了从研发、测试、生产到服务的产品开发所有阶段。
瀚文网星同时提供非标设备设计、加工服务,为您提供软、硬件一体化的解决方案,帮助您“聚精会神谋发展、全心全意搞科研”。
公司经美国国家仪器NI官方认证,已正式成为NI联盟合