海南堆垛机厂家





- ¥10000.00
- 2023-09-12 18:13:00
- 堆垛机
- 山东青岛
- 西安威仁自动化科技有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

信息介绍
详细参数
早期的堆垛机是在桥式起重机的起重小车上悬挂一个门架(立柱),利用货叉在立柱上的上下运动及立柱的旋转运动来搬运货物,通常称为桥式堆垛机。1960年左右在美国出现了巷道式堆垛机。这种堆垛机利用地面导轨来防止倾倒。其后,随着计算机控制技术和自动化立体仓库的发展,堆垛机的运用越来越广泛,技术性能越来越好,高度也越来越高。如今,堆垛机的高度可以达到40米。事实上,如果不受仓库建筑和费用限制,堆垛机的高度还可以更高。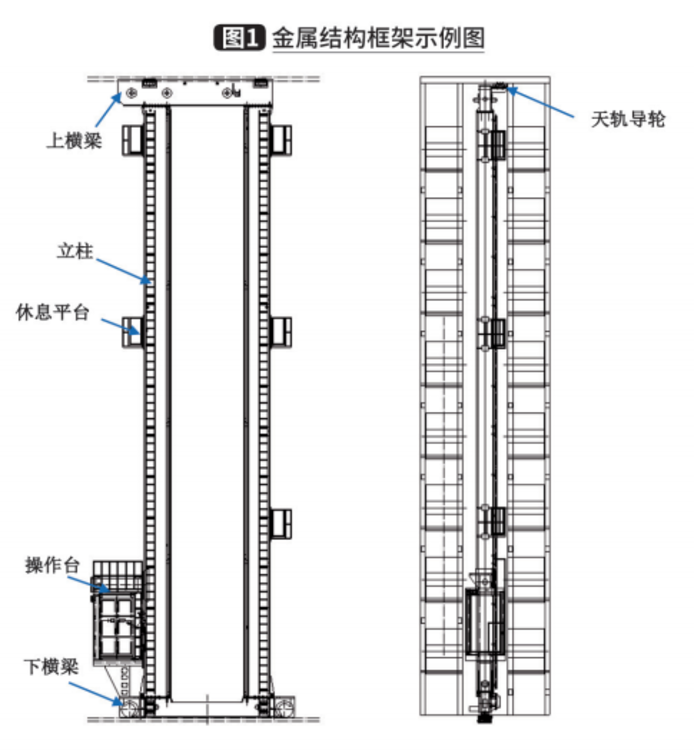
堆垛机的操作方式:
使用堆垛起重机的货架系统要按货架的列、层、行的所在货位分别编号,以便实现向货位自动地进出库,也便于利用电子计算机进行在库管理。实际上,新的大型立体自动仓库大多采用电子计算机进行在库管理。然而,为了节省设备投资,在小型自动仓牢中,多数仍采用手动控制和半自动控制。
一、手动控制
手动控制是司机在堆垛起重机的司机台上一边查看货位号码,一边操作操纵手柄或按钮完成行走、升降、货叉进出。
二、半自动控制
司机在堆垛起重机的司机台上,按动所需货位号的按钮,起重机就自动完成行走、升降各种动作,并停止在的货位号处。货叉的进出动作由手动操纵杆或用按钮进行控制。返回动作大多是按动返回按钮即可自动返回原位。
三、全自动控制
这是属于无人操纵的形式,操纵盘装在起重机外,用按钮或穿孔卡等为指令。因此,只要按下启动电钮,就能遥控堆垛起重机自动进行进出库动作。近来也有采用磁心存贮器等存贮装置来存贮各货位号的库存量或品种,进行在库管理的方式。
四、计算机控制
设置与电子计算机直联的地面控制盘,把进出库指令输入电子计算机,进行集中控制。通过电子计算机发出的进出库指令存贮在地面控制盘上的前置盒式计算器中,计算器一边控制堆垛起重机把目标货物自动地进出库,一边进行进出库货位号、品种、次数等运算,实施在库管理。
在大型立体自动仓库中,往往采用这种管理方式。在现已建成的小型立货架式仓库中,也有一些采用小型电子计算机进行在库管理的。
作为自动仓储系统的核心设备,堆垛机具有稳定、可靠的机械电气性能,优良的入出库处理能力完全满足用户需求。
堆垛机主要有三个方向的运动:
行走:堆垛机在马达驱动下沿巷道前后往返运动
升降:升降台在马达驱动下沿主柱上下往返运动
叉取:货叉在马达驱动下在入出库站或货位移载货物
堆垛机是立体仓库中的主要起重运输设备,也是立体仓储系统中具代表性的设备。堆垛机的历史早可以追溯到上世纪中叶,美国便出现了利用桥式起重机改造的堆垛机雏形,在1960年代诞生了早期巷道式堆垛机,随着堆垛机的逐渐完善,正式宣告了立体仓储时代的到来,人类的仓储空间向三维立体化发展。半个世纪以来,堆垛机经历了手动操控、半自动操控、全自动操控和数字化操控时代,变得更快、更高、更安全,技术性能越来越好,高度也越来越高,堆垛机历久弥新的核心原因在于解决了仓储过程中的三大难题:空间利用率显著提高,全自动化操作,有效节省人力,全过程可被追溯,有效助力了物流信息自动化。堆垛机是立体仓储系统中具有代表性的设备之一,威仁科技深耕智慧物流行业十余载,堆垛机作为企业核心产品,具有稳定、、可靠等特点,广泛适用于各类型立体仓库、线边库存储系统等。
堆垛机的选择:
选用何种堆垛机一般有货物重量、货物载具结构、货物吞吐量、立库高度等综合考量决定;
需要根据货物重量确定堆垛机载荷量、机械结构(单立柱或是双立柱等),并根据货物载具结构选定货叉结构及是否需要配置托盘(字母托盘);其次需要根据立库高度选择堆垛机高度;再次根据货物吞吐量选择堆垛机行走速度、起升速度和货叉伸缩速度。
堆垛机种类繁多,从各种类型可以看出,有以下分类:
1、根据柱的数量可分为单柱、双柱、多柱堆垛机;
2、按地面轨道构成可分为单轨、双轨、多轨堆垛机;
3、单工位、双工位、多工位堆垛机可分为载货台工位数量;
4、存取货叉结构可分为单伸位、双伸位、多伸位堆垛机;
5、可分为推拉叉、夹夹叉、辊链输送机构、动力台车机构堆垛机;
6、可分为直轨型、U型弯轨型、M型弯轨型、转轨型等。
7、按驱动方式可分为单驱型。双驱型。
- 堆垛机
- 立体自动仓库
- 山东青岛
- 张女士
堆垛机厂家信息
-
 百色球场高杆灯¥ 1000
百色球场高杆灯¥ 1000 -
 山东堆垛机出售¥ 10000
山东堆垛机出售¥ 10000 -
 上海松江区生鲜食品配送中心推荐_推荐¥ 12
上海松江区生鲜食品配送中心推荐_推荐¥ 12 -
 萧山区新街街道-代理注册营业执照电话面议
萧山区新街街道-代理注册营业执照电话面议 -
 遂昌本地移动公厕租赁市场价格移动公厕租赁¥ 350
遂昌本地移动公厕租赁市场价格移动公厕租赁¥ 350 -
 福建堆垛机材质¥ 10000
福建堆垛机材质¥ 10000









