吉林堆垛机电话




- ¥10000.00
- 2023-09-12 16:47:55
- 堆垛机
- 河南平顶山
- 西安威仁自动化科技有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

信息介绍
详细参数
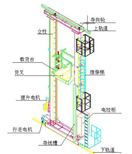
堆垛起重机也称为堆垛机,是指采用货叉或串杆作为取物装置,在仓库、车间等处攫取、搬运和堆垛或从高层货架上取放单元货物的起重机。
堆垛起重机的分类方式很多,主要分类形式如下:
(一)按照有无导轨进行分类
可分为有轨堆垛起重机和无轨堆垛起重机,其中,有轨堆垛起重机是指堆垛起重机沿着巷道内的轨道运行,无轨堆垛起重机又称高架叉车。在立体仓库中运用的主要作业设备有:有轨巷道堆垛起重机、无轨巷道堆垛起重机和普通叉车。
(二)按照高度不同进行分类
可分为低层型、中层型和高层型,其中,低层型堆垛起重机是指起升高度在5m以下,主要用于分体式高层货架仓库中及简易立体仓库中;中层型堆垛起重机是指起升高度在5~15m,高层型堆垛起重机是指起升高度在15m以上,主要用于一体式的高层货架仓库中。
(三)按照驱动方式不同进行分类
可分为上部驱动式、下部驱动式和上下部相结合的驱动方式。
(四)按照自动化程度不同进行
可分为手动、半自动和自动堆垛起重机。手动和半自动堆垛起重机上带有司机室,自动堆垛起重机不带有司机室,采用自动控制装置进行控制,可以进行自动寻址、自动装卸货物。
(五)堆垛起重机按照用途不同可分为桥式堆垛起重机和巷道堆垛起重机
桥式堆垛起重机是指堆垛货又有悬挂立柱导向的堆垛起重机;巷道堆垛起重机是指金属结构有上、下支撑支持,起重机沿着仓库巷道运行,装取成件物品的堆垛起重机。
堆垛机的操作方式:
使用堆垛起重机的货架系统要按货架的列、层、行的所在货位分别编号,以便实现向货位自动地进出库,也便于利用电子计算机进行在库管理。实际上,新的大型立体自动仓库大多采用电子计算机进行在库管理。然而,为了节省设备投资,在小型自动仓牢中,多数仍采用手动控制和半自动控制。
一、手动控制
手动控制是司机在堆垛起重机的司机台上一边查看货位号码,一边操作操纵手柄或按钮完成行走、升降、货叉进出。
二、半自动控制
司机在堆垛起重机的司机台上,按动所需货位号的按钮,起重机就自动完成行走、升降各种动作,并停止在的货位号处。货叉的进出动作由手动操纵杆或用按钮进行控制。返回动作大多是按动返回按钮即可自动返回原位。
三、全自动控制
这是属于无人操纵的形式,操纵盘装在起重机外,用按钮或穿孔卡等为指令。因此,只要按下启动电钮,就能遥控堆垛起重机自动进行进出库动作。近来也有采用磁心存贮器等存贮装置来存贮各货位号的库存量或品种,进行在库管理的方式。
四、计算机控制
设置与电子计算机直联的地面控制盘,把进出库指令输入电子计算机,进行集中控制。通过电子计算机发出的进出库指令存贮在地面控制盘上的前置盒式计算器中,计算器一边控制堆垛起重机把目标货物自动地进出库,一边进行进出库货位号、品种、次数等运算,实施在库管理。
在大型立体自动仓库中,往往采用这种管理方式。在现已建成的小型立货架式仓库中,也有一些采用小型电子计算机进行在库管理的。
双立柱堆垛机机架一般是由两根立柱和上横梁、下横梁组合而成,形成一个长方形框架。
双立柱堆垛机特点:
1.立柱形式分为两种,即方管和圆管。
2.双立柱堆垛机拥有较好的刚性和强度,且运行平稳。
3.双立柱堆垛机一般应用于高度较高、起重量较大和水平运行速度高的立体仓库
4.双立柱堆垛机的起升机构:一般采用的是链条传动,通过电机减速机驱动链轮转动,从而实现链条引载货台沿立柱或起升机导轨作升降运动
5.双立柱堆垛机准确定位:链条牵引载货台或配重装置,受空间尺寸限制,传动和布置较复杂,但其会准确定位。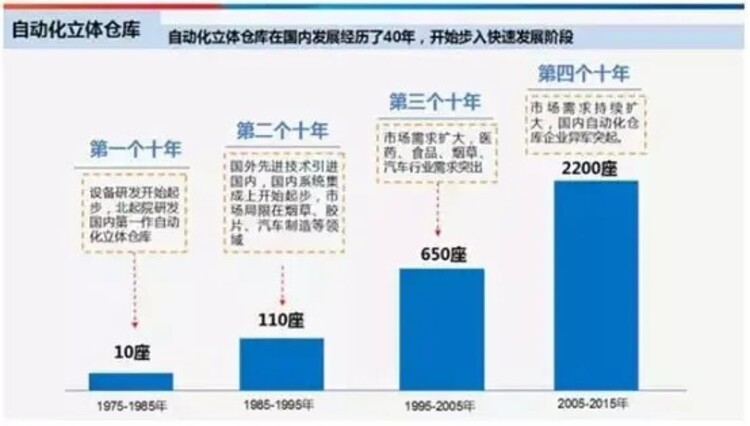
堆垛机是立体仓库中的主要起重运输设备,也是立体仓储系统中具代表性的设备。堆垛机的历史早可以追溯到上世纪中叶,美国便出现了利用桥式起重机改造的堆垛机雏形,在1960年代诞生了早期巷道式堆垛机,随着堆垛机的逐渐完善,正式宣告了立体仓储时代的到来,人类的仓储空间向三维立体化发展。半个世纪以来,堆垛机经历了手动操控、半自动操控、全自动操控和数字化操控时代,变得更快、更高、更安全,技术性能越来越好,高度也越来越高,堆垛机历久弥新的核心原因在于解决了仓储过程中的三大难题:空间利用率显著提高,全自动化操作,有效节省人力,全过程可被追溯,有效助力了物流信息自动化。堆垛机是立体仓储系统中具有代表性的设备之一,威仁科技深耕智慧物流行业十余载,堆垛机作为企业核心产品,具有稳定、、可靠等特点,广泛适用于各类型立体仓库、线边库存储系统等。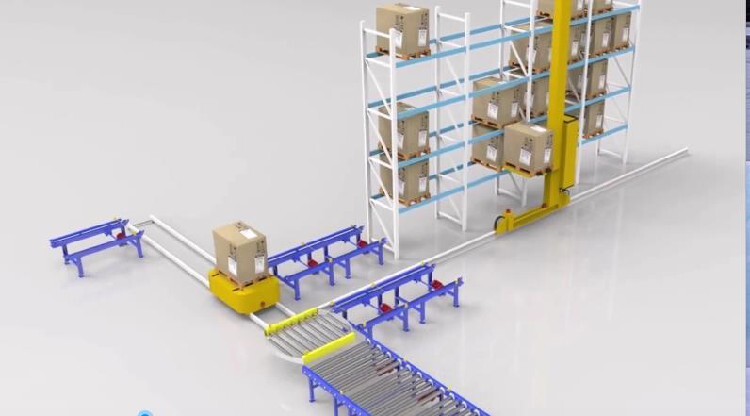
威仁科技是一家专注于从事智能仓储、智能物流配套自动化设备之解决方案、设计制造、安装服务于一体的综合性企业。 公司主要产品有:智能立体仓库、堆垛机、智能循环货柜、智能垂直提升货柜、桁架机器人、智能仓储设备软件及技术解决方案、仓储管理系统、物流输送系统、非标生产线、锂电池生产线、立体仓库维保等。因为,所以自信,期待与您的合作!
- 堆垛机
- 立体自动仓库
- 河南平顶山
- 张女士
堆垛机电话信息
-
 昌平沙河吊车出租叉车-挖掘机在国内推广应用面议
昌平沙河吊车出租叉车-挖掘机在国内推广应用面议 -
 新疆堆垛机设计说明书¥ 10000
新疆堆垛机设计说明书¥ 10000 -
 西藏优质供应商集分水器功能面议
西藏优质供应商集分水器功能面议 -
 安徽堆垛机报价¥ 10000
安徽堆垛机报价¥ 10000 -
 成都耐用集分水器面议
成都耐用集分水器面议 -
 河南堆垛机设计生产¥ 10000
河南堆垛机设计生产¥ 10000








