科尔摩根伺服驱动器批发,科尔摩根伺服驱动器批发






- 面议
- 2024-12-29 18:57:08
- 科尔摩根伺服驱动器,科尔摩根伺服系统,科..
- 湖南长沙
- 深圳长欣自动化设备有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

信息介绍
详细参数
伺服系统是用来地跟随或复现某个过程的反馈控制系统,由控制器,功率驱动装置,反馈装置和电动机等部分构成。它的主要任务是按控制命令的要求、对功率进行放大、变换与调控等处理,使驱动装置输出的力矩、速度和位置控制灵活方便。
对伺服系统的基本要求有稳定性、精度和快速响应性。
稳定性好:作用在系统上的扰动消失后,系统能够恢复到原来的稳定状态下运行或者在输入指令信号作用下,系统能够达到新的稳定运行状态的能力,在给定输入或外界干扰作用下,能在短暂的调节过程后到达新的或者回复到原有平衡状态;
精度高:伺服系统的精度是指输出量能跟随输入量的程度。作为精密加工的数控机床,要求的定位精度或轮廓加工精度通常都比较高,允许的偏差一般都在 0.01~0.00lmm之间;
快速响应性好:有两方面含义,一是指动态响应过程中,输出量随输入指令信号变化的迅速程度,二是指动态响应过程结束的迅速程度。快速响应性是伺服系统动态品质的标志之一,即要求跟踪指令信号的响应要快,一方面要求过渡过程时间短,一般在200ms以内,甚至小于几十毫秒;另一方面,为满足超调要求,要求过渡过程的陡,即上升率要大。
节能高:由于伺服系统的快速相应,注塑机能够根据自身的需要对供给进行快速的调整,能够有效提高注塑机的电能的利用率,从而达到节能。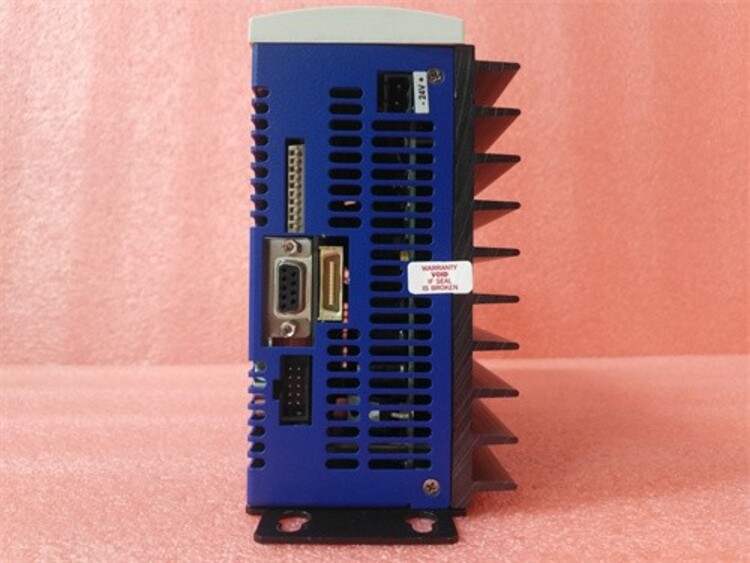
通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环 PID 控制时速度模式也可以进行定位,但把电机的位置信号或直接负载的位置信号给上位反馈以做运算用。
伺服驱动器具有完备的过流、过载、过压等保护功能,可以实现对伺服电机的保护,不考虑伺服驱动器逆变侧谐波对伺服电机影响的情况下。
工作原理
伺服驱动器的工作原理基于闭环控制系统。它包括三个主要部分:传感器、控制器和执行器。传感器负责检测电机的实际状态,如转速、位置和电流等。控制器根据传感器的反馈信号和设定值,计算出控制信号,然后将其发送给执行器,即伺服电机。执行器根据控制信号调整电机的输出,使其达到预定的目标状态。
未来发展趋势
随着工业自动化的不断发展,伺服驱动器也在不断创新和进化。未来,伺服驱动器有望在以下方面取得更大的突破:
1. 控制: 伺服驱动器将会不断提升性能,实现更高的精度和更快的响应速度,以满足日益复杂的自动化需求。
2. 智能化技术: 伺服驱动器将融入更多的智能化技术,如人工智能和机器学习,使其能够自动适应不同的工作环境和任务。
3. 节能环保: 伺服驱动器将会更加注重能源效率和环保性能,采用的节能技术,降低能源消耗和排放。
4. 多轴控制: 随着机器设备变得越来越复杂,伺服驱动器将支持多轴控制,实现多个轴的协同运动。
在总体来看,伺服驱动器作为现代工业自动化的核心部件,将在未来持续发展并发挥更大的作用,推动工业技术的不断创新和进步。
- 科尔摩根伺服驱动器,科尔摩根伺服系统,科..
- 伺服驱动器
- 湖南长沙
- 王经理
科尔摩根伺服驱动器信息
-
 无锡江阴市供应农夫山泉,农夫山泉5L*4桶*2箱面议
无锡江阴市供应农夫山泉,农夫山泉5L*4桶*2箱面议 -
 天津科尔摩根伺服驱动器多少钱,科尔摩根伺服驱动器价格面议
天津科尔摩根伺服驱动器多少钱,科尔摩根伺服驱动器价格面议 -
 无锡新吴区从事娃哈哈桶装水送水电话,桶装水配送中心面议
无锡新吴区从事娃哈哈桶装水送水电话,桶装水配送中心面议 -
 无锡百岁山矿泉水供应,饮用天然矿泉水面议
无锡百岁山矿泉水供应,饮用天然矿泉水面议 -
 惠山区从事娃哈哈4.5升桶装水供应,无锡市桶装水批发面议
惠山区从事娃哈哈4.5升桶装水供应,无锡市桶装水批发面议 -
 2025私人老板收购孙小头百色—古钱币收购中心电话¥ 8888
2025私人老板收购孙小头百色—古钱币收购中心电话¥ 8888









